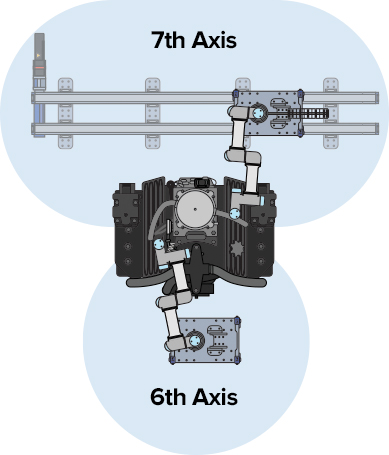
Główna różnica między robotami 6-osiowymi i 7-osiowymi dotyczy zakresu ich ruchu i stopni swobody. Robot 6-osiowy działa z sześcioma stopniami swobody, co pozwala mu wykonywać szeroki zakres zadań z elastycznością zbliżoną do ramienia człowieka. Jednak jego ruch jest ograniczony do obszaru w jego zasięgu, ponieważ znajduje się na nieruchomej podstawie.
Robot 7-osiowy uzyskuje dodatkowy stopień swobody dzięki temu, że jest zamontowany na liniowym torze lub systemie prowadzącym. Dlatego robot 7-osiowy ma wszystkie opcje ruchu i elastyczność robota 6-osiowego, a dodatkowo może poruszać się poziomo lub pionowo po prostej ścieżce. Dodatkowa oś znacznie zwiększa funkcjonalność i obszar roboczy robota, umożliwiając mu dostęp do wielu stanowisk roboczych lub pokonywanie większych odległości bez konieczności ponownego montażu.
