

Siłowniki liniowe z silnikiem krokowym (SMLA) łączą w jednej kompaktowej obudowie silnik krokowy, precyzyjną śrubę pociągową i nakrętkę, zapewniając w pełni konfigurowalne, dostosowane do potrzeb i wytrzymałe rozwiązanie do ruchu liniowego. Za pomocą sterownika ruchu i silnika krokowego wszystkie urządzenia SMLA można zaprogramować w celu umieszczenia ładunku w precyzyjnym położeniu. Standardowe konfiguracje nie zapewniają jednak mechanizmu sprzężenia zwrotnego, który informowałby operatora, czy ruch został ukończony, czy nie.
Choć sprzężenie zwrotne nie jest niezbędne w wielu zastosowaniach, może być ono potężnym narzędziem do wykorzystania w bardziej złożonych systemach ruchu liniowego. Z tego powodu, a także ze względu na rosnące zapotrzebowanie na precyzyjne informacje o położeniu ładunku, wyposażenie siłownika SMLA w enkoder może być skutecznym i prostym rozwiązaniem, które w danym zastosowaniu pozwoli uzyskać informacje zwrotne o ruchu w czasie rzeczywistym.
Podstawowe konfiguracje siłowników SMLA
Na ilustracji 1 przedstawiono trzy najpopularniejsze konstrukcje siłowników SMLA: ze śrubą pociągową z napędem silnikowym (MLS), z nakrętką pociągową z napędem silnikowym (MLN) i siłownik liniowy z napędem silnikowym (MLA). Każda z tych konstrukcji jest wyposażona w silnik krokowy, śrubę pociągową i nakrętkę, ale różnią się sposobem uzyskiwania ruchu.
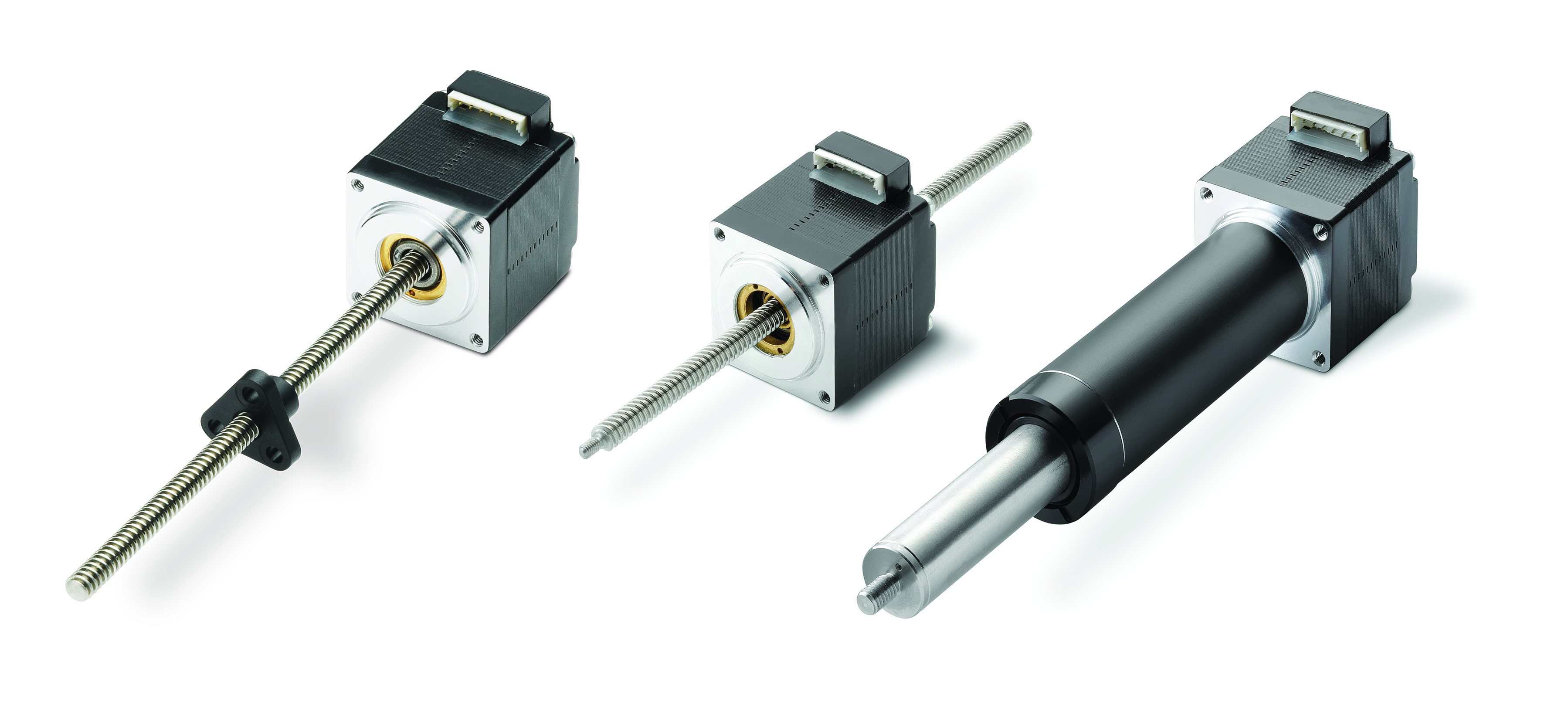
Ilustracja 1. Typy siłowników SMLA (od lewej do prawej: MLS, MLN i MLA). Ilustracja dzięki uprzejmości Thomson Industries, Inc.
W przypadku jednostek MLS śruba pociągowa jest przymocowana bezpośrednio do wału silnika, który podczas obrotu powoduje zmianę położenia nakrętki. Urządzenia MLN posiadają nakrętkę umieszczoną wewnątrz wału silnika, która po obróceniu przesuwa śrubę pociągową zamiast nakrętki. Konfiguracje MLA to w zasadzie jednostki MLS z dodatkowymi komponentami, które mieszczą śrubę pociągową i nakrętkę, a także zapewniają zintegrowane wsparcie i prowadzenie.
Otwarta pętla siłownika liniowego
Ilustracja 2 przedstawia architekturę SMLA z otwartą pętlą, która ma zastosowanie do wszystkich konfiguracji. Użytkownicy komunikują się z systemem za pośrednictwem interfejsu człowiek-maszyna (HMI). Programują oni żądaną sekwencję ruchu w sterowniku ruchu, który przesyła ją do sterownika silnika krokowego w celu przetworzenia i wzmocnienia, a następnie przesłania do SMLA, który wykonuje ruchy. Komunikacja jest jednokierunkowa; ani kontroler ruchu, ani HMI nie otrzymują żadnego powiadomienia o pomyślnym wykonaniu zamierzonego ruchu.
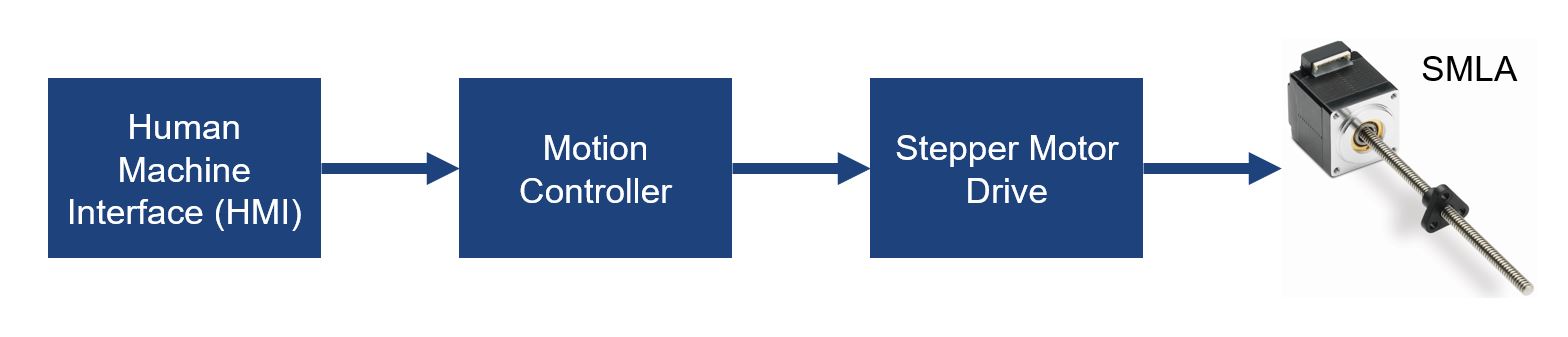
Ilustracja 2. Architektura podstawowej konfiguracji systemu otwartego do sterowania SMLA. Ilustracja dzięki uprzejmości Thomson Industries, Inc.
Dokładna znajomość miejsca położenia ładunku ma kluczowe znaczenie w przypadku wielu precyzyjnych zastosowań, takich jak sprzęt medyczny, urządzenia pomiarowe i sprzęt laboratoryjny. Ponadto niektóre aplikacje mogą się nieoczekiwanie wyłączyć lub ich obciążenie może zmienić swoją pozycję. W takich scenariuszach dokładne ustalenie położenia ładunku byłoby niemożliwe bez użycia mechanizmu sprzężenia zwrotnego.
Dobrym przykładem zastosowania wykorzystującego funkcjonalność enkodera jest automatyczna maszyna do pipetowania. (Ilustracja 3) Urządzenia te wykorzystują enkoder na osi poziomej w celu dokładnego śledzenia położenia pipety dozującej i zapewnienia, że płyn jest przenoszony do właściwej probówki. Inne przykłady obejmują pompy cieczy, drukarki 3D i platformy XY.
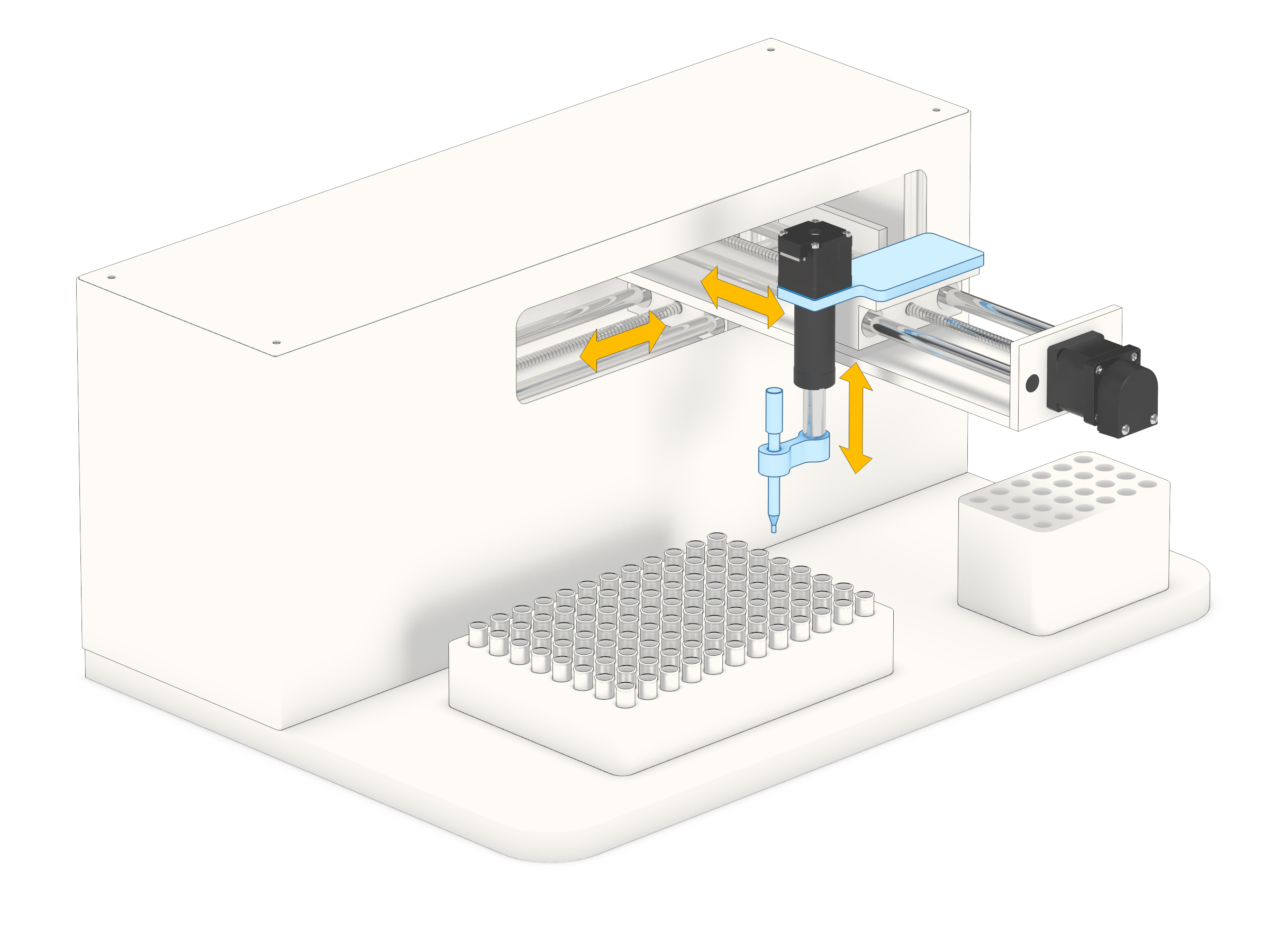
Ilustracja 3. Zautomatyzowane urządzenia do pipetowania mogą wykorzystywać enkoder na osi poziomej. Ilustracja dzięki uprzejmości Thomson Industries, Inc.
Zamknięcie pętli za pomocą optycznych enkoderów obrotowych
Wiele urządzeń SMLA można wyposażyć w funkcję sprzężenia zwrotnego poprzez dodanie enkodera obrotowego. Enkodery obrotowe, zwane również enkoderami wałowymi, zamieniają położenie kątowe wału na analogowe lub cyfrowe sygnały wyjściowe. Optyczne enkodery obrotowe są najpowszechniejszym rozwiązaniem pozwalającym na dodanie funkcji sprzężenia zwrotnego do zespołów SMLA. Ilustracja 4 pokazuje, w jaki sposób dodanie enkodera do SMLA może zapewnić sprzężenie zwrotne do sterownika i udostępniać ważne dane dotyczące ruchu, takie jak położenie, prędkość i kierunek.
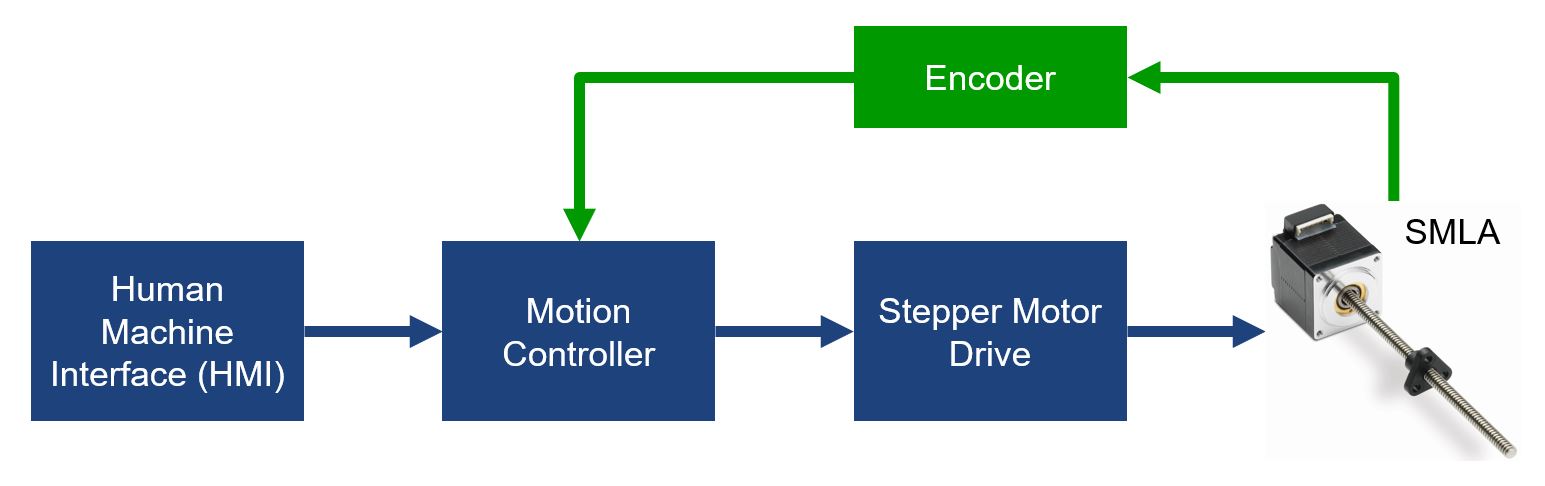
Ilustracja 4. Architektura podstawowej konfiguracji systemu zamkniętego do obsługi SMLA. Ilustracja dzięki uprzejmości Thomson Industries, Inc.
Uzyskiwanie pozycji za pomocą enkoderów
Istnieją dwa główne typy enkoderów obrotowych: przyrostowe i absolutne. (Ilustracja 5)
Przyrostowe enkodery obrotowe wykorzystują obracający się dysk połączony z wałem i umieszczony pomiędzy źródłem światła a czujnikiem fotoelektrycznym. Liczne szczeliny rozmieszczone równomiernie na obwodzie dysku przepuszczają światło do czujnika w postaci wzorców impulsów reprezentujących cechy ruchu.
W zastosowaniach wymagających jeszcze bardziej szczegółowych danych o ruchu lub dodatkowego poziomu ochrony na wypadek zaniku zasilania korzystne będzie zastosowanie enkodera absolutnego. Podobnie jak enkodery przyrostowe, enkodery absolutne są montowane centralnie i obracają się wraz z wałem silnika, pomiędzy źródłem światła i czujnikiem fotoelektrycznym. Zamiast równomiernie rozmieszczonych szczelin, jak w enkoderach przyrostowych, enkodery absolutne wykorzystują skomplikowany układ unikalnych otworów na znacznie większej powierzchni dysku. Przerywają one sygnały świetlne w taki sposób, że układ scalony detektora może je odczytać jako dokładniejsze odwzorowanie każdego położenia kątowego w trakcie ruchu — nawet bez urządzenia bazującego.
Ilustracja 5. Procesy dla enkoderów przyrostowych (po lewej) i enkoderów absolutnych (po prawej). Ilustracja dzięki uprzejmości Thomson Industries, Inc.
Wdrażanie enkoderów obrotowych
W wielu przypadkach enkodery można zintegrować ze wszystkimi trzema typami konfiguracji SMLA (MLS, MLN i MLA). Do przykręcenia korpusu enkodera potrzebna jest jedynie płaska powierzchnia oraz wałek, na którym zamontowany zostanie dysk optyczny. Wałek musi być przedłużeniem oryginalnego wału silnika, aby dysk optyczny mógł się obracać wraz z nim i dokładnie rejestrować ruch silnika, jak pokazano na ilustracji 6.
Ilustracja 6. Montaż enkodera na silniku przystosowanym do enkodera z wymaganym wystającym wałem i powierzchniami montażowymi. Ilustracja dzięki uprzejmości Thomson Industries, Inc.
SMLA z dodanymi enkoderami optycznymi (od lewej do prawej: MLS, MLN i MLA). Ilustracja dzięki uprzejmości Thomson Industries, Inc.
Liczymy kroki
Chociaż otwarte układy SMLA nadają się do wielu zastosowań, użytkownicy silników krokowych, którym zależy na bieżącym sprzężeniu zwrotnym z informacją o położeniu obciążenia, powinni rozważyć dodanie do swoich silników enkoderów. Enkodery mogą zapewniać informacje o położeniu, dane w czasie rzeczywistym dotyczące prędkości, kierunku i innych parametrów, jednocześnie usprawniając kontrolę i monitorowanie ładunku. W przypadku podstawowego sprzężenia zwrotnego dotyczącego położenia użytkownicy powinni postawić na enkodery przyrostowe, jeśli jednak wymagana jest wysoka precyzja lub możliwość utrzymania położenia po włączeniu zasilania urządzenia, powinni rozważyć zastosowanie enkoderów absolutnych.
Zamknięcie pętli sprzężenia zwrotnego za pomocą optycznych enkoderów obrotowych nie tylko spełnia wymagania dzisiejszych precyzyjnych zastosowań, ale także pozycjonuje SMLA jako wartościowe komponenty w rozwijającym się krajobrazie Przemysłu 4.0 i innowacji w zakresie łączności cyfrowej, zapewniając ich ciągłą przydatność i efektywność w kolejnej generacji automatyki przemysłowej.