Thomson Linear Motion Optmized

Choose Your Login Account
Thomson currently has two account systems - one for the website and CAD model downloads, and one for e-commerce. We understand that two logins is an inconvenience and are working to consolidate our systems into one login process. Until we’re able to consolidate the two logins, please follow these guidelines:
Website Login
- Download CAD models
- Save and retrieve projects in LinearMotioneering® and MicronMotioneering® tools
- Access Distributor Extranet and all related resources
E-commerce Login
- Order directly from Thomson online (North America only)
- Authorized Thomson Distributors can view and order from quotes online (Global)
- View the shopping cart and look up prior direct orders

Actionneur linéaire à moteur pas à pas
Les vis-mères motorisées de Thomson associent un moteur pas à pas hybride à une vis-mère de précision dans une enveloppe compacte. La technologie Taper-Lock, en instance de brevet, permet un bridage sûr et parfaitement aligné, ainsi qu’un désaccouplement rapide. Les vis-mères motorisées de Thomson sont disponibles dans deux configurations de référence, la vis rotative (S) et l'écrou rotatif (N). Les ensembles de vis-mères peuvent s'actionner par l'intermédiaire du moteur qui entraîne une rotation, et translater une charge attachée à l'écrou-mère. Les ensembles d'écrous-mères sont actionnés par la rotation d'un écrou dans le corps du moteur. Le mouvement est obtenu en exerçant une contrainte sur le moteur et en translatant une charge attachée à la vis-mère ou en exerçant une contrainte sur la vis-mère et en translatant une charge attachée au moteur.
Visionnez notre webinaire sur l’actionneur linéaire à moteur pas à pas >
Trouver un produit







































Sélectionner le type de produit
Actionneurs à vis-mère motorisée
Configuration entièrement sous boîtier avec guidage et assistance intégrés pour une installation facile.
Configuration à vis rotative (MLS)
Configuration à vis rotative et écrou externe permettant diverses combinaisons de moteurs, de vis et d’écrous.
Configuration à écrou rotatif (MLN)
Configuration à écrou rotatif interne permettant des dimensions compactes et un mouvement simplifié.
NEMA 8
Face carrée de 0,8" x 0,8" pouvant supporter des charges jusqu’à 5 lbs
NEMA 11
Face carrée de 1,1" x 1,1" pouvant supporter des charges jusqu’à 20 lbs
NEMA 14
Face carrée de 1,4" x 1,4" pouvant supporter des charges jusqu’à 50 lbs
NEMA 17
Face carrée de 1,7" x 1,7" pouvant supporter des charges jusqu’à 75 lbs
NEMA 23
Face carrée de 2,3" x 2,3" pouvant supporter des charges jusqu’à 200 lbs
Aucune préférence
NEMA 8
Face carrée de 0,8" x 0,8" pouvant supporter des charges jusqu’à 5 lbs
NEMA 11
Face carrée de 1,1" x 1,1" pouvant supporter des charges jusqu’à 20 lbs
NEMA 14
Face carrée de 1,4" x 1,4" pouvant supporter des charges jusqu’à 50 lbs
NEMA 17
Face carrée de 1,7" x 1,7" pouvant supporter des charges jusqu’à 75 lbs
NEMA 23
Face carrée de 2,3" x 2,3" pouvant supporter des charges jusqu’à 200 lbs
Aucune préférence
NEMA 11
Face carrée de 1,1" x 1,1" pouvant supporter des charges jusqu’à 20 lbs
NEMA 14
Face carrée de 1,4" x 1,4" pouvant supporter des charges jusqu’à 50 lbs
NEMA 17
Face carrée de 1,7" x 1,7" pouvant supporter des charges jusqu’à 75 lbs
NEMA 23
Face carrée de 2,3" x 2,3" pouvant supporter des charges jusqu’à 200 lbs
Aucune préférence
Écrou à jeu standard
Jeu entre la vis et l’écrou jusqu’à 0,010 po (0,25 mm).
Écrou anti-jeu
Écrous préchargés sans jeu entre la vis et l’écrou.
Écrou à jeu standard
Jeu entre la vis et l’écrou jusqu’à 0,010 po (0,25 mm).
Écrou anti-jeu
Écrous préchargés sans jeu entre la vis et l’écrou.
Écrou à jeu standard
Jeu entre la vis et l’écrou jusqu’à 0,010 po (0,25 mm).
Écrou anti-jeu
Écrous préchargés sans jeu entre la vis et l’écrou.
Écrou à jeu standard
Jeu entre la vis et l’écrou jusqu’à 0,010 po (0,25 mm).
Écrou anti-jeu
Écrous préchargés sans jeu entre la vis et l’écrou.
Écrou à jeu standard
Jeu entre la vis et l’écrou jusqu’à 0,010 po (0,25 mm).
Écrou anti-jeu
Écrous préchargés sans jeu entre la vis et l’écrou.
Écrou à jeu standard
Jeu entre la vis et l’écrou jusqu’à 0,010 po (0,25 mm).
Écrou anti-jeu
Écrous préchargés sans jeu entre la vis et l’écrou.
RSF
Écrou compact en acétal de qualité pour roulements avec bride de montage triangulaire.
RSFH
Écrou compact en PEEK haute performance de qualité pour roulement avec bride de montage triangulaire.
SN
Écrou en acétal de qualité pour roulement avec filetage de montage impérial (pouces). *Écrou principal de montage à filetage métrique disponible sur demande.
MTS
Écrou en acétal de qualité pour roulement avec bride de montage triangulaire ou ronde.
XCMF
Écrou miniature à montage à bride avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
XCMT
Écrou miniature à montage fileté impérial avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
SNAB
Écrou de montage à filetage personnalisable avec une précharge du ressort jusqu’à 9 lbs.
RSF
Écrou compact en acétal de qualité pour roulements avec bride de montage triangulaire.
RSFH
Écrou compact en PEEK haute performance de qualité pour roulement avec bride de montage triangulaire.
SN
Écrou en acétal de qualité pour roulement avec filetage de montage impérial (pouces). *Écrou principal de montage à filetage métrique disponible sur demande.
BN
Écrou en bronze de qualité pour roulement avec filetage de montage impérial (pouces).
MTS
Écrou en acétal de qualité pour roulement avec bride de montage triangulaire ou ronde.
XCF
Écrou de montage sur bride avec grande rigidité axiale, faible traînée et compensation active de l’usure.
XCT
Écrou de montage à filetage impérial avec grande rigidité axiale, faible traînée et compensation active de l’usure. *Écrou principal de montage à filetage métrique disponible sur demande.
XCMF
Écrou miniature à montage à bride avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
XCMT
Écrou miniature à montage fileté impérial avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
AFT
Écrou de montage sur bride avec charge nominale jusqu’à 25 lbs.
SNAB
Écrou de montage à filetage personnalisable avec une précharge du ressort jusqu’à 9 lbs.
RSF
Écrou compact en acétal de qualité pour roulements avec bride de montage triangulaire.
RSFH
Écrou compact en PEEK haute performance de qualité pour roulement avec bride de montage triangulaire.
SN
Écrou en acétal de qualité pour roulement avec filetage de montage impérial (pouces). *Écrou principal de montage à filetage métrique disponible sur demande.
BN
Écrou en bronze de qualité pour roulement avec filetage de montage impérial (pouces).
MTS
Écrou en acétal de qualité pour roulement avec bride de montage triangulaire ou ronde.
XCF
Écrou de montage sur bride avec grande rigidité axiale, faible traînée et compensation active de l’usure.
XCT
Écrou de montage à filetage impérial avec grande rigidité axiale, faible traînée et compensation active de l’usure. *Écrou principal de montage à filetage métrique disponible sur demande.
XCMF
Écrou miniature à montage à bride avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
XCMT
Écrou miniature à montage fileté impérial avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
AFT
Écrou de montage sur bride avec charge nominale jusqu’à 25 lbs.
SNAB
Écrou de montage à filetage personnalisable avec une précharge du ressort jusqu’à 9 lbs.
RSF
Écrou compact en acétal de qualité pour roulements avec bride de montage triangulaire.
RSFH
Écrou compact en PEEK haute performance de qualité pour roulement avec bride de montage triangulaire.
SN
Écrou en acétal de qualité pour roulement avec filetage de montage impérial (pouces). *Écrou principal de montage à filetage métrique disponible sur demande.
BN
Écrou en bronze de qualité pour roulement avec filetage de montage impérial (pouces).
MTS
Écrou en acétal de qualité pour roulement avec bride de montage triangulaire ou ronde.
XCF
Écrou de montage sur bride avec grande rigidité axiale, faible traînée et compensation active de l’usure.
XCT
Écrou de montage à filetage impérial avec grande rigidité axiale, faible traînée et compensation active de l’usure. *Écrou principal de montage à filetage métrique disponible sur demande.
XCMF
Écrou miniature à montage à bride avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
XCMT
Écrou miniature à montage fileté impérial avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
AFT
Écrou de montage sur bride avec charge nominale jusqu’à 25 lbs.
SNAB
Écrou de montage à filetage personnalisable avec une précharge du ressort jusqu’à 9 lbs.
RSF
Écrou compact en acétal de qualité pour roulements avec bride de montage triangulaire.
RSFH
Écrou compact en PEEK haute performance de qualité pour roulement avec bride de montage triangulaire.
SN
Écrou en acétal de qualité pour roulement avec filetage de montage impérial (pouces). *Écrou principal de montage à filetage métrique disponible sur demande.
BN
Écrou en bronze de qualité pour roulement avec filetage de montage impérial (pouces).
MTS
Écrou en acétal de qualité pour roulement avec bride de montage triangulaire ou ronde.
XCF
Écrou de montage sur bride avec grande rigidité axiale, faible traînée et compensation active de l’usure.
XCT
Écrou de montage à filetage impérial avec grande rigidité axiale, faible traînée et compensation active de l’usure. *Écrou principal de montage à filetage métrique disponible sur demande.
AFT
Écrou de montage sur bride avec charge nominale jusqu’à 25 lbs.
SNAB
Écrou de montage à filetage personnalisable avec une précharge du ressort jusqu’à 9 lbs.
RSF
Écrou compact en acétal de qualité pour roulements avec bride de montage triangulaire.
RSFH
Écrou compact en PEEK haute performance de qualité pour roulement avec bride de montage triangulaire.
SN
Écrou en acétal de qualité pour roulement avec filetage de montage impérial (pouces). *Écrou principal de montage à filetage métrique disponible sur demande.
BN
Écrou en bronze de qualité pour roulement avec filetage de montage impérial (pouces).
MTS
Écrou en acétal de qualité pour roulement avec bride de montage triangulaire ou ronde.
XCF
Écrou de montage sur bride avec grande rigidité axiale, faible traînée et compensation active de l’usure.
XCT
Écrou de montage à filetage impérial avec grande rigidité axiale, faible traînée et compensation active de l’usure. *Écrou principal de montage à filetage métrique disponible sur demande.
XCMF
Écrou miniature à montage à bride avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
XCMT
Écrou miniature à montage fileté impérial avec forte rigidité axiale, basse transmission, compensation active de l’usure et charges nominales pouvant atteindre 5 lbf (22 N). Uniquement pour les vis-mères de 0,188 pouce, 0,250 pouce, 4 mm et 6 mm.
AFT
Écrou de montage sur bride avec charge nominale jusqu’à 25 lbs.
SNAB
Écrou de montage à filetage personnalisable avec une précharge du ressort jusqu’à 9 lbs.
Notes de conception, d’installation et de maintenance
1.
Sélectionnez la configuration de l’actionneur linéaire à moteur pas à pas
Déterminez la configuration requise par l’application : vis rotative (MLS), écrou rotatif (MLN) ou actionneur (MLA). Cliquer ici pour voir des exemples d’application.
2.
Sélectionnez la taille du moteur
Sélectionnez la taille qui convient par rapport aux performances souhaitées, à la taille du châssis moteur, etc. Thomson propose cinq modèles de base (MLxX8, MLx11, MLx14, MLx17 et MLx23) avec différentes option d’enroulements du moteur, de courses linéaires et de capacités de chargement.
3.
Sélectionnez la configuration de la vis-mère et l’usinage ou le montage des extrémités
Pour les MLS ou MLN, sélectionnez le diamètre et la longueur de la vis-mère par rapport à la course nécessaire de l’application et au type d’usinage des extrémités que nécessite la vis. Pour les MLA, sélectionnez la vis-mère ou la course souhaitée par pas, longueur de course et montage d’extrémité.
4.
Sélectionnez l’écrou
Pour les configurations de vis rotatives (MLS), faites votre choix parmi les différents styles, matériaux et jeux de montage d’écrou. Par défaut, les configurations d’écrous rotatifs (MLN) incluent toujours un écrou avec jeu standard et matériau hautes performances. Par défaut, toutes les configurations MLA incluent un jeu standard et un écrou avec matériau hautes performances.
5.
Montez l’actionneur linéaire à moteur pas à pas
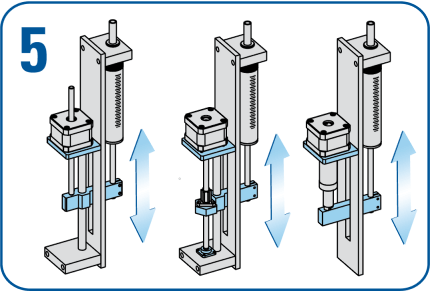
Montez l’unité sur votre assemblage. Pour les MLA, aidez-vous des indications de montage des extrémités ci-dessous.
Montage des extrémités des MLA
Lors de l’installation de votre charge sur l’extrémité d’un assemblage MLA, utilisez toujours les flats dédiés indiqués ci-dessous pour éviter tout surcouple et edommagement des composants internes de l’actionneur.
Exemples d’applications
MLA
Prélèvement par pipette
Positionnement vertical de la plaque
Surveillance de l’inclinaison
MLS
Prélèvement par pipette
Tables XY
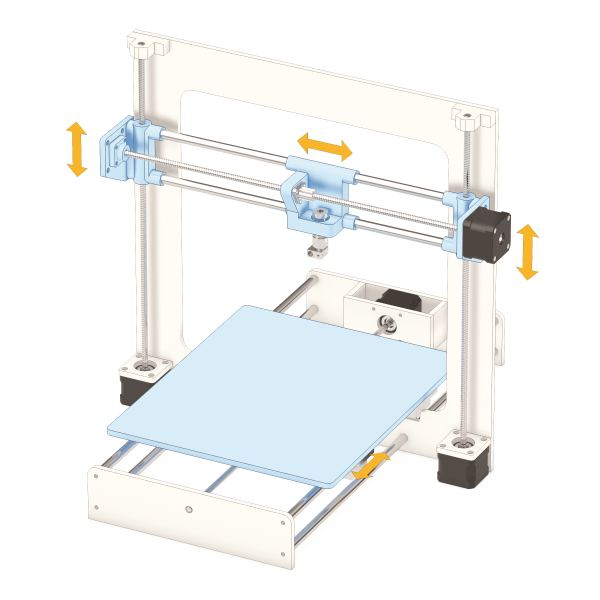
Impression 3D
Pompes à fluides
MLN
Pince robotisée
Positionnement horizontal
Pompes à fluides
Codeur
Error
Vue d'ensemble
Sélecteur de produits
Sélecteur de produits
Sélecteur de produits



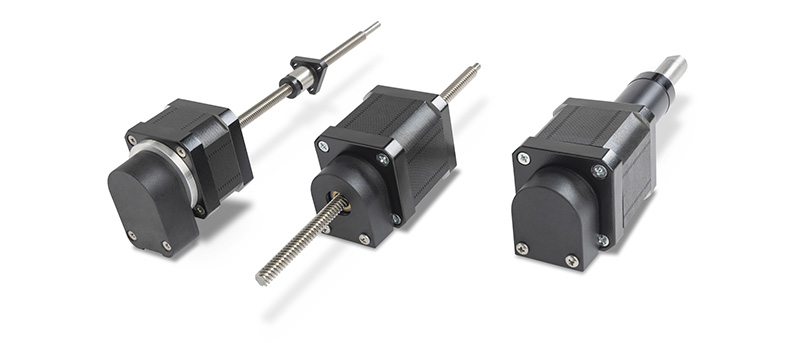
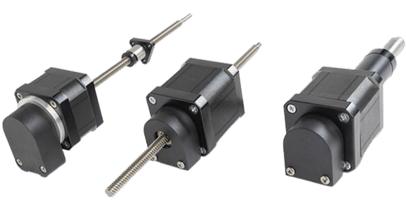
Actionneurs linéaires à moteur pas à pas standard
Vérin (MLA)
Les MLA constituent une solution complète dans laquelle le mouvement est pris en charge pour vous : il vous suffit de définir la longueur de course, la course linéaire par pas ou par rotation et le niveau de précision pour trouver le modèle approprié.
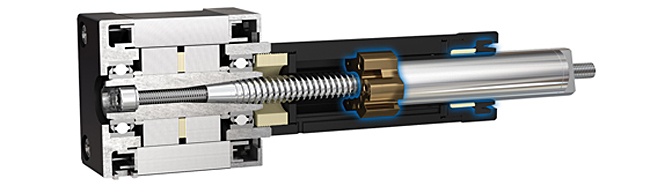
Vis rotative (MLS)
Les ensembles MLS sont actionnés grâce à la rotation d'une vis de commande entraînée par le moteur pas à pas et la translation d'une charge fixée à l'écrou d'entraînement.
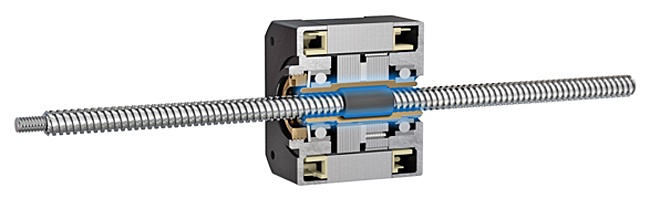
Écrou rotatif (MLN)
Les ensembles MLN sont actionnés grâce à la rotation d'un écrou dans le corps du moteur pas à pas. Le mouvement est réalisé par contrainte du moteur et translation d'une charge fixée à la vis de commande ou par contrainte de la vis de commande et translation d'une charge fixée au moteur pas à pas.
Rotary Encoders Available as a Standard Option
Rotary encoders deliver real-time information about position, speed and direction.
They can be seamlessly pre-assembled onto the backs of all three types of
Thomson stepper motor linear actuator assemblies as a standard option.
Please contact Thomson Customer Support for more details.
Options d'actionneur linéaire à moteur pas à pas personnalisé
Optimisez votre conception avec une solution personnalisée d'actionneur linéaire à moteur pas à pas.
Combinant des technologies de moteur et de vis-mère de pointe, les vérins linéaires à moteur pas à pas préconçus mettent une solution de mouvement linéaire compacte à la disposition des applications à haute précision.
Pourquoi choisir un vérin linéaire à moteur pas à pas Thomson ?
Thomson propose trois configurations de base : vis rotative (MLS), écrou rotatif (MLN) et vérin (MLA). La vis rotative à architecture ouverte et les vis-mères motorisées à écrou rotatif conviennent aux applications où un guidage externe est présent ou lorsqu'un haut niveau de flexibilité de conception est requis, tandis que l'assemblage fermé du vérin à vis-mère motorisée est idéal pour simplifier davantage le processus de conception et éliminer le besoin d'un guidage externe.Options de personnalisation
Thomson collabore régulièrement avec des fabricants d'équipements d'origine partout dans le monde pour résoudre les problèmes, améliorer l'efficacité et renforcer la valeur transmise à ses clients. Notre expérience en matière de technologies et d'applications peut vous aider à obtenir des produits personnalisés répondant à tous les besoins de votre prochain produit.Par où commencer ?
Thomson propose un grand nombre de ressources en ligne pour vous aider, quel que soit le stade où vous vous trouvez dans le processus décisionnel d'achat :VIDEO: Stepper Motor Linear Actuator Assembly Configurations
Precision lead screws can be combined with a stepper motor in a number of ways. At Thomson, we offer three configurations of stepper motor linear actuators to meet the various needs of our customers' applications. Learn more about them and discover which of them can benefit your linear motion designs.

VIDEO: What is a Stepper Motor and How is it Useful for Linear Motion?
Combined with a precision lead screw, the stepper motor is utilized in one of Thomson’s main product families – stepper motor linear actuators. This video takes a closer look at this motor, its main components, how they work, and why they are useful in linear motion applications in comparison to other types of motors.

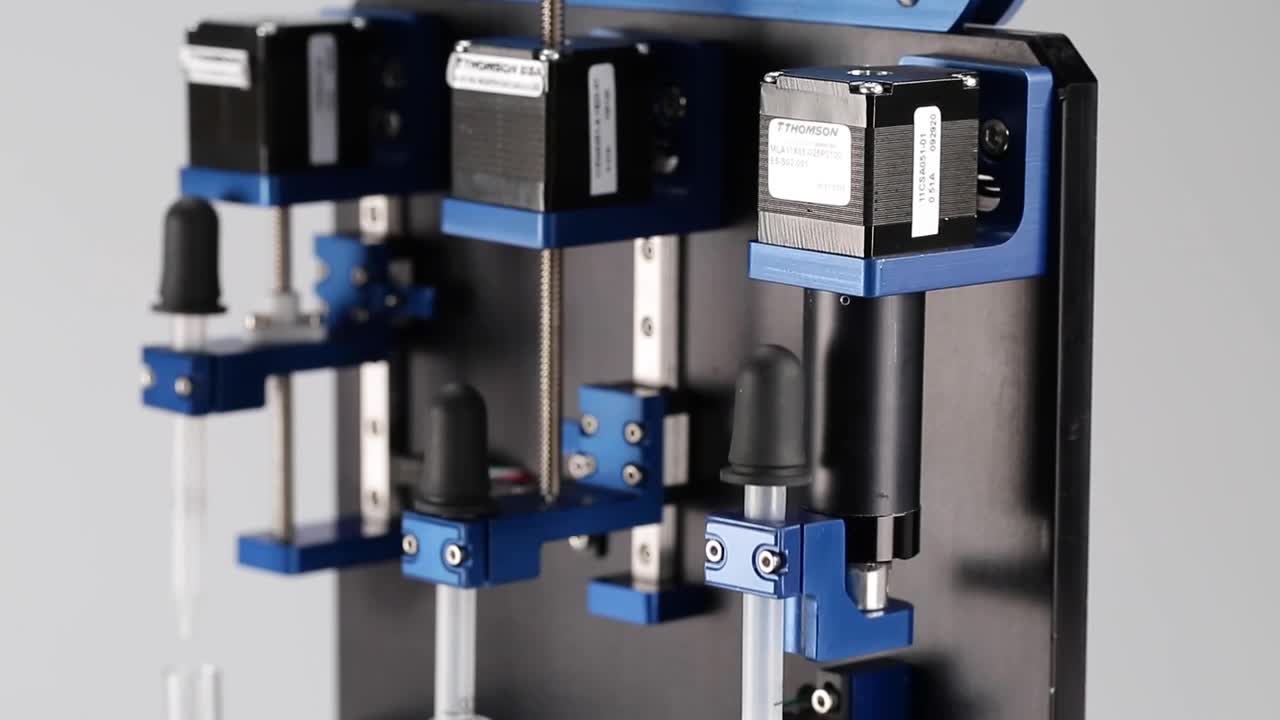
VIDÉO : Actionneur linéaire à moteur pas à pas avec Taper-Lock
Découvrez comment entretenir correctement la vis-mère motorisée Thomson sur site. Les unités de précision allient un moteur pas à pas hybride et une vis-mère dans une enveloppe compacte, et offrent ainsi tous les avantages d'une solution plus petite, plus solide et plus efficace que les autres technologies.
Apprenez à réparer correctement l’actionneur linéaire à moteur pas à pas Thomson sur site. Les unités conçues avec précision combinent un moteur pas à pas hybride et une vis-mère en un boîtier compact, offrant ainsi des avantages évidents avec une solution plus petite, plus solide et plus efficace que les autres technologies.

Technical Articles
-
Leveraging Stepper Motor Linear Actuator Configurability
When designers and integrators need simple, flexible and compact linear actuation, they often turn to stepper motor linear actuators (SMLAs). The high configurability of SMLAs is among their greatest virtues, but sorting through myriad configuration options to tailor the optimal solution for a particular application can be a challenge for even the most seasoned motion engineer. Understanding the unique capabilities and limitations of each type of SMLA will make it easier to take maximum advantage of their wide range of flexibility.
En savoir plus -
Mise en œuvre du guidage antirotation pour les vérins linéaires à moteur pas à pas
L'intégration de moteurs pas à pas dans les vis-mères est une méthode facile et économique pour obtenir un mouvement linéaire précis. Toutefois, un guidage antirotation est nécessaire pour atteindre cette précision. Il doit être ajouté de manière externe par l'utilisateur ou intégré dans la conception par le fabricant. Le choix de l'option appropriée passe par une analyse de votre besoin de système de guidage et une évaluation des avantages et inconvénients de chaque approche.
En savoir plus -
Réduisez vos ensembles de mouvement linéaire en un composant unique grâce aux vérins à vis-mère motorisée
Lorsqu'il s'agit de spécifier un dispositif de mouvement linéaire dans une machine, les concepteurs de systèmes ont le choix entre une multitude d'options. Ce choix peut avoir une incidence sur la facilité d'installation, l'encombrement et le coût d'exploitation. Un mécanisme d'entraînement fréquemment utilisé pour obtenir un mouvement linéaire est un ensemble basé sur un moteur pas à pas et une vis-mère à soutien externe. Mais une approche plus simple et plus facile à installer consisterait à sélectionner un mécanisme d'entraînement avec guidage et soutien intégrés, ce qui permettrait d'éliminer le besoin des composants externes qui assureraient normalement ces fonctions et la complexité associée.
En savoir plus
Spécifications de l’actionneur linéaire à moteur pas à pas (unités impériales) :
| S = Vis rotative (MLS), N = Écrou rotatif (MLN), A = Actionneur (MLA) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Course linéaire / pas complet (μ po) / Full Step (μ in.) |
Pas hélicoïdal (mm) |
Désignateur de pas hélicoïdal (mm) |
Moteur | |||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | |||||||||
| Désignateur de diamètre [centièmes de po de diamètre] | ||||||||||||
| 18 | 18 | 25 | 25 | 31 | 37 | 31 | 37 | 43 | 50 | |||
| 0.063² | 0.013 | 0013 | S,A¹³ | S,N,A¹³ | S¹³ | S¹³ | S,N¹³ | S,N,A¹³ | S¹³ | |||
| 0.125² | 0.025 | 0025 | S,A¹³ | S,N,A¹³ | S¹ | S,N,A¹ | S¹³ | |||||
| 0.157 | 0.031 | 0031 | S,A | S,N,A | S¹ | S,N,A¹ | ||||||
| 0.165 | 0.033 | 0033 | S¹ | |||||||||
| 0.179 | 0.036 | 0036 | S,A¹³ | S,N,A¹³ | ||||||||
| 0.200 | 0.040 | 0040 | S¹ | S,N,A¹ | ||||||||
| 0.209 | 0.042 | 0042 | S,A¹³ | S,N,A¹³ | S¹³ | S¹³ | S,N¹³ | S,N,A¹³ | ||||
| 0.250 | 0.050 | 0050 | S,A | S,N | S,A¹ | S,N,A¹ | S¹ | S,N,A¹ | S¹³ | S¹³ | ||
| 0.313 | 0.063 | 0063 | S,A¹ | S,N,A¹ | S | S,N,A | S¹ | |||||
| 0.357 | 0.071 | 0071 | S,A¹ | S,N,A¹ | ||||||||
| 0.394 | 0.079 | 0079 | S,A¹ | S,N,A¹ | S¹ | S,N,A¹ | ||||||
| 0.417 | 0.083 | 0083 | S | S¹ | S,N | S,N,A¹ | ||||||
| 0.490 | 0.098 | 0098 | S¹ | |||||||||
| 0.500 | 0.100 | 0100 | S,A | S,N | S | S,N,A | S¹ | |||||
| 0.591 | 0.118 | 0118 | S,A¹ | S,N,A¹ | ||||||||
| 0.625 | 0.125 | 0125 | S,A¹ | S,N¹ | S,A | S,N,A | S¹ | S,N,A¹ | S¹ | |||
| 0.787 | 0.157 | 0157 | S,A¹ | S,N,A¹ | ||||||||
| 0.833 | 0.167 | 0.167 | S | S | S,N | S,N,A | ||||||
| 0.960 | 0.192 | 0.192 | S,A¹ | S,N,A¹ | ||||||||
| 1.000 | 0.200 | 0200 | S,A | S,N | S,A¹ | S,N,A¹ | S¹ | S,N,A¹ | S¹ | |||
| 1.180 | 0.236 | 0236 | S¹ | |||||||||
| 1.250 | 0.250 | 0250 | S,A¹ | S,N,A¹ | S | S | S,N | S,N,A | S¹ | S¹ | ||
| 1.500 | 0.300 | 0.300 | S¹ | S,N,A¹ | ||||||||
| 1.665 | 0.333 | 0.333 | S,A¹³ | S,N¹³ | ||||||||
| 1.875 | 0.375 | 0.375 | S,A¹³ | S,N¹³ | S¹ | S,N,A¹ | ||||||
| 2.000 | 0.400 | 0.400 | S,A | S,N | ||||||||
| 2.500 | 0.500 | 0500 | S,A¹³ | S,N¹³ | S,A | S,N,A | S | S | S,N | S,N,A | S¹ | S¹ |
| 3.750 | 0.750 | 0750 | S,A¹³ | S,N,A¹³ | S¹³ | S,N,A¹³ | ||||||
| 4.000 | 0.800 | 0.800 | S¹³ | |||||||||
| 5.000 | 1.000 | 1000 | S³ | S³ | S,N³ | S,N,A³ | S¹³ | |||||
| 6.000 | 1.200 | 1.200 | S¹³ | S,N,A¹³ | ||||||||
| 7.500 | 1.500 | 1.500 | S¹³ | |||||||||
1. Certains pas hélicoïdaux sont susceptibles de ne pas être disponibles dans un matériau d’écrou hautes performances, dans des configurations à écrou rotatif (MLN) ou dans certains écrous anti-jeu. Contactez Thomson pour plus d’informations.
2. Les vis-mères à pas fin peuvent présenter des capacités de charge nettement inférieures à celles des vis-mères traditionnelles.
3. Vis-mère non disponible en modèle de précision (P)
Spécifications de l’actionneur linéaire à moteur pas à pas (unités métriques) :
| S = Vis rotative (MLS), Écrou rotatif (MLN) , Actionneur (MLA) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Course linéaire / pas complet (μ po) / Full Step (mm) |
Pas hélicoïdal (mm) |
Désignateur de pas hélicoïdal (mm) |
Moteur | ||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | ||||||||
| Désignateur de diamètre | |||||||||||
| M04 | M04 | M06 | M06 | M08 | M10 | M08 | M10 | M12 | |||
| 3 | 0.6 | 006 (0024) | S,A¹ | S,N,A¹ | |||||||
| 5 | 1.0 | 010 (0039) | S | S,N | S,A | S,N,A | |||||
| 6 | 1.2 | 012 (0047) | S,A¹ | S,N,A¹ | |||||||
| 10 | 2.0 | 020 (0079) | S | S | S,N | S,N,A | S¹ | ||||
| 15 | 3.0 | 030 (0118) | S | S,N,A | S¹ | ||||||
| 20 | 4.0 | 040 (0157) | S | S,N | S | S,N | S¹ | ||||
| 25 | 5.0 | 050 (0197) | S | S,N,A | |||||||
| 30 | 6.0 | 060 (0236) | S,A | S,N,A | S¹ | S,N,A¹ | S¹ | ||||
| 40 | 8.0 | 080 (0315) | S³ | S,N³ | S | S,N | |||||
| 50 | 10.0 | 100 (0394) | S | S,N,A | S¹ | ||||||
| 60 | 12.0 | 120 (0472) | S,A | S,N,A | S | S¹ | S,N | S,N,A¹ | |||
| 75 | 15.0 | 150 (0591) | S¹ | ||||||||
| 80 | 16.0 | 160 (0630) | S¹ | ||||||||
| 90 | 18.0 | 180 (0709) | S,A¹³ | S,N,A¹³ | |||||||
| 100 | 20.0 | 200 (0787) | S³ | S | S,N³ | S,N,A | |||||
| 125 | 25.0 | 250 (0984) | S¹³ | ||||||||
| 175 | 35.0 | 350 (1378) | S¹³ | S,N,A¹³ | |||||||
| 225 | 45.0 | 450 (1772) | S¹³ | ||||||||
1. Certains pas hélicoïdaux sont susceptibles de ne pas être disponibles dans un matériau d’écrou hautes performances, dans des configurations à écrou rotatif (MLN) ou dans certains écrous anti-jeu. Contactez Thomson pour plus d’informations.
2. Les désignations de pas hélicoïdal pour MLA sont indiquées entre parenthèses.
3. Vis-mère non disponible en modèle de précision (P)
Caractéristiques de l’actionneur linéaire à moteur pas à pas
- Augmentation de la densité de couple
- Efficacité accrue
- Vis rotative ou écrou rotatif
- Tailles personnelles/Vis disponibles
- L'avantage Taper Lock
- Réduction du bruit
- Disponible en dimensions pouces et métriques
Champs d'application
- Équipements médicaux
- Étages X-Y
- Impression 3D
- Vannes de contrôle des systèmes CVC
- Dispositifs de pipetage
- Machines CNC
- Pompes à seringue/fluide
Documents
Brochures
Manuels
MODÈLES CAO



Choisissez votre modèle CAO :
MLA
MLS
MLN
Pour télécharger les modèles ci-dessous, vous devez vous connecter.
To provide better service to you on our websites, we and our service providers use cookies to collect your personal data when you browse. For information about our use of cookies and how to decline them or turn them off please read our cookie policy [available here].