

Les actionneurs linéaires à moteur pas à pas (SMLA) associent un moteur pas à pas, une vis de commande de précision et un écrou dans un boîtier compact, pour proposer une solution précisément configurable, personnalisable et robuste pour le mouvement linéaire. À l'aide d'un contrôleur de mouvement et d'un entraînement pas à pas, tous les SMLA peuvent être programmés pour positionner une charge à un emplacement précis. Toutefois, les configurations standard ne fournissent pas de mécanisme de rétroaction indiquant à l'opérateur si le mouvement est terminé ou non.
Bien qu'elle ne soit pas essentielle pour de nombreuses applications, la rétroaction peut être un outil puissant à utiliser dans des systèmes de mouvement linéaire plus sophistiqués. De ce fait, et du fait de la demande croissante d'informations précises sur le positionnement de la charge, équiper un SMLA d'un codeur peut être une solution efficace et simple pour obtenir une rétroaction de mouvement en temps réel sur votre application.
Configurations de base des SMLA
La Figure 1 montre trois des constructions de SMLA les plus courantes : une vis de commande motorisée (MLS), un écrou de commande motorisé (MLN) et un actionneur linéaire motorisé (MLA). Chacune de ces constructions possède un moteur pas à pas, une vis de commande et un écrou en son noyau, mais elle diffère dans la manière dont le mouvement est obtenu.
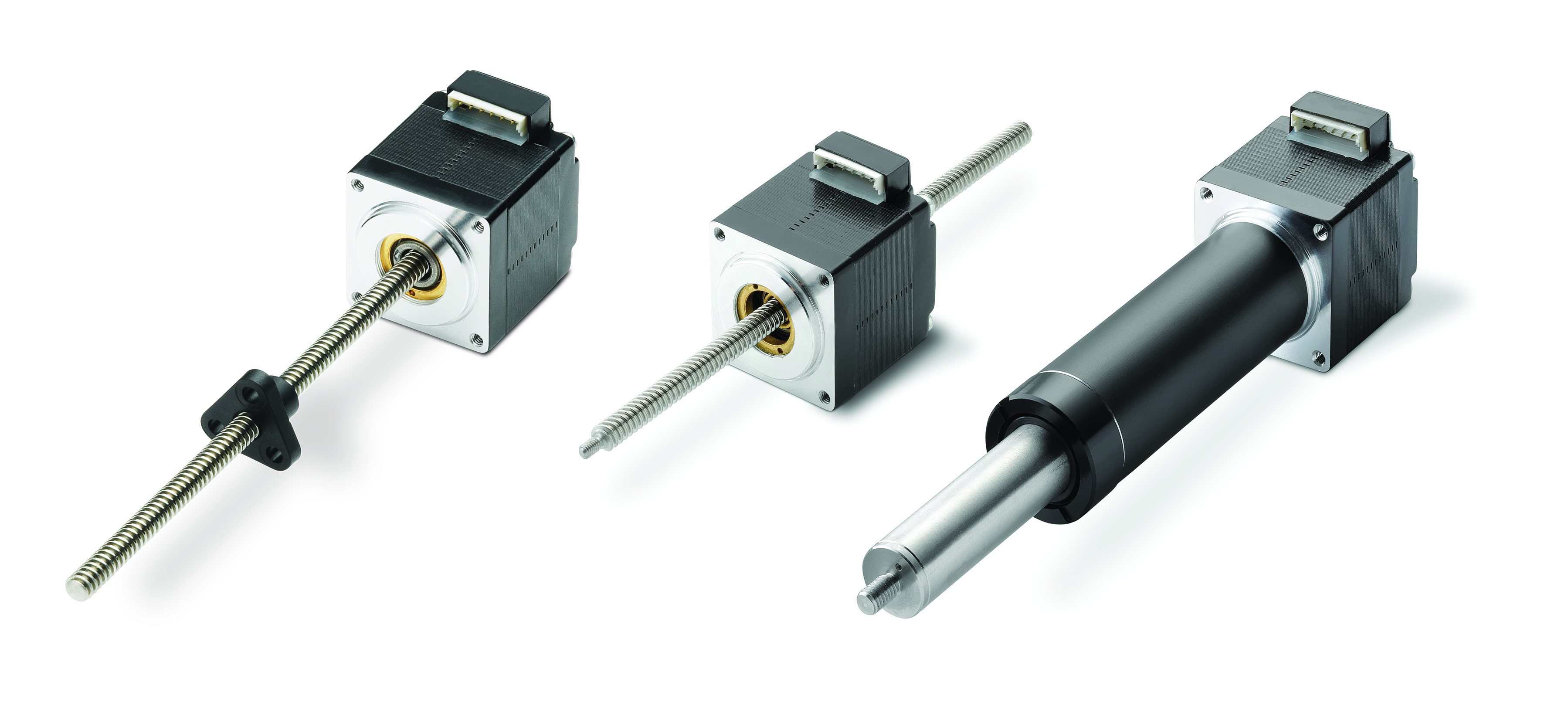
Figure 1. Types de SMLA (de gauche à droite : MLS, MLN et MLA). Image reproduite avec l'autorisation de Thomson Industries, Inc.
Pour les unités MLS, la vis de commande se fixe directement sur l'arbre du moteur, ce qui déplace l'écrou lors de la rotation. Les unités MLN intègrent l'écrou à l'intérieur de l'arbre du moteur qui, lorsqu'il tourne, déplace la vis de commande au lieu de l'écrou. Les configurations MLA sont pour l'essentiel des unités MLS avec des composants supplémentaires qui abritent la vis de commande et l'écrou tout en fournissant également un support et un guidage intégrés.
Actionnement linéaire en boucle ouverte
La Figure 2 illustre l'architecture SMLA en boucle ouverte qui s'applique à toutes les configurations. Les utilisateurs interagissent avec le système au moyen d'une interface homme-machine (IHM). Ils programment la séquence de mouvement souhaitée dans le contrôleur de mouvement, qui l'envoie à l'entraînement de moteur pas à pas pour la conversion et l' amplification, avant de la transmettre au SMLA, qui réalise les mouvements. La trajectoire de communication est unidirectionnelle ; ni le contrôleur de mouvement, ni l'IHM ne reçoivent jamais de notification indiquant que le mouvement prévu a été correctement effectué.
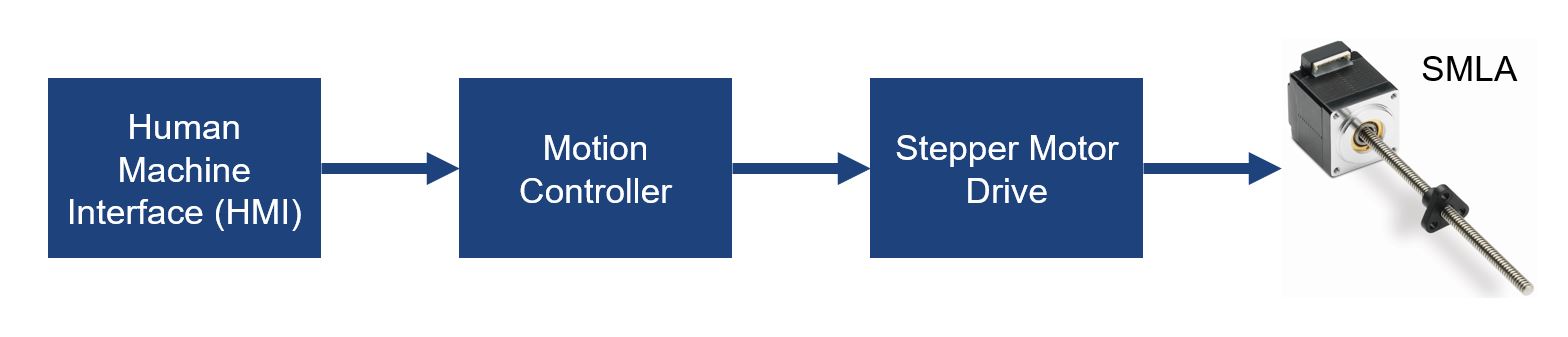
Figure 2 : architecture d'un système en boucle ouverte de base configuré pour piloter un SMLA. Image reproduite avec l'autorisation de Thomson Industries, Inc.
Savoir exactement où est positionnée une charge est essentiel pour de nombreuses applications de haute précision comme les instruments médicaux, les appareils de mesure et les équipements de laboratoire. De plus, certaines applications peuvent s'éteindre de manière inattendue ou voir leur charge déplacée hors de sa position. Dans de tels scénarios, il serait impossible de connaître la position exacte de la charge sans utiliser un mécanisme de rétroaction.
Une machine de pipetage automatisée est un bon exemple d'application qui bénéficie de la fonctionnalité d'un codeur. (Figure 3) Ces dispositifs utilisent un codeur sur l'axe horizontal pour suivre avec précision l'emplacement de la pipette de distribution et garantir que le liquide est transféré dans le tube à essais approprié. D'autres exemples incluent les pompes à fluide, les imprimantes 3D et les étages XY.
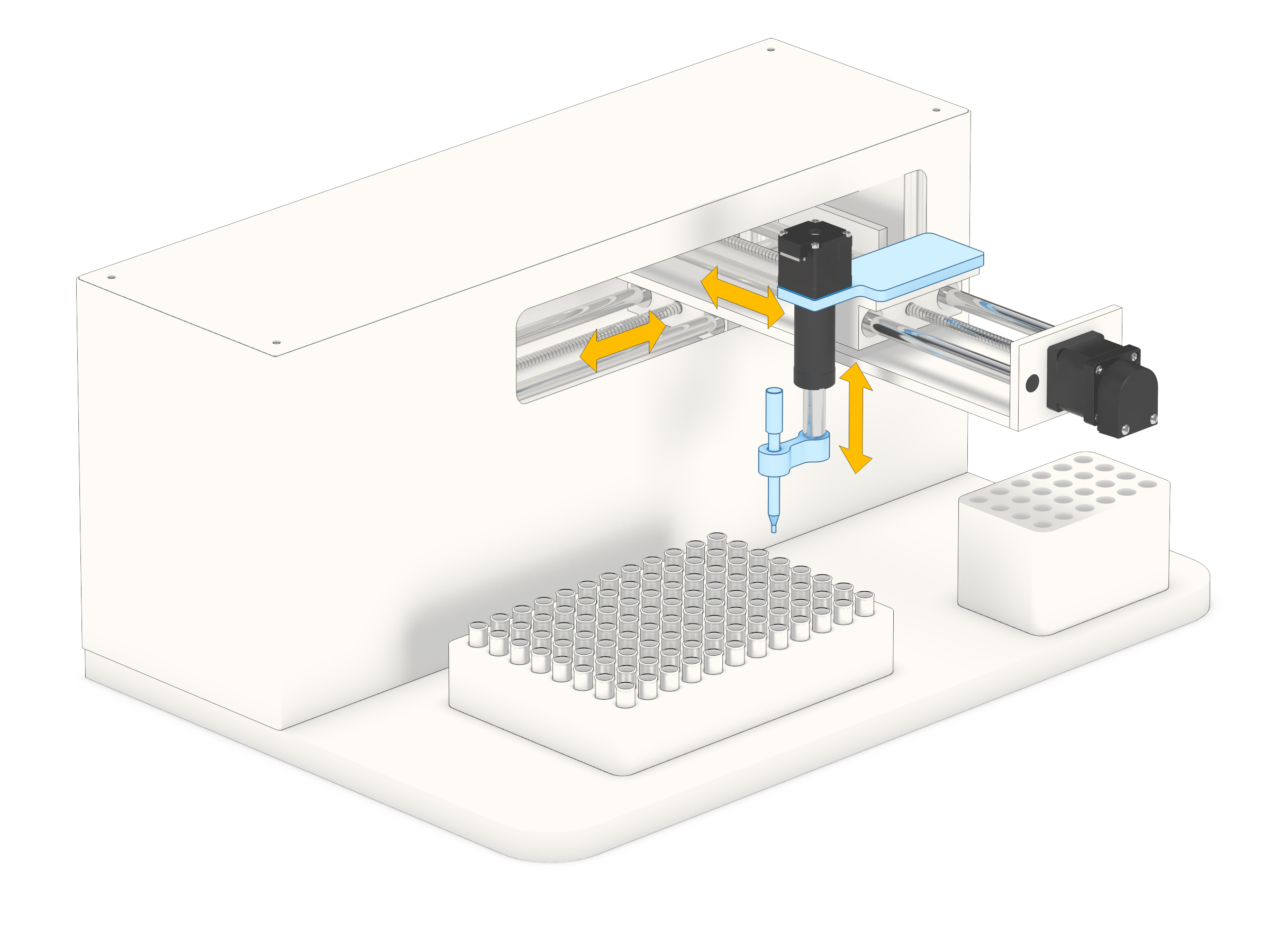
Figure 3 : les machines de pipetage automatisées peuvent utiliser un codeur sur leur axe horizontal. Image reproduite avec l'autorisation de Thomson Industries, Inc.
Fermeture de la boucle avec des codeurs rotatifs optiques
De nombreux SMLA peuvent être équipés pour fournir une rétroaction en ajoutant un codeur rotatif. Les codeurs rotatifs, également appelés codeurs d'arbre, convertissent la position angulaire d'un arbre en signaux de sortie analogiques ou numériques. Les codeurs rotatifs optiques constituent l'option la plus courante pour ajouter une fonctionnalité de rétroaction aux ensembles SMLA. La Figure 4 illustre comment l'ajout d'un codeur à un SMLA peut fournir une rétroaction au contrôleur et partager des données de mouvement importantes comme la position, la vitesse ou la direction.
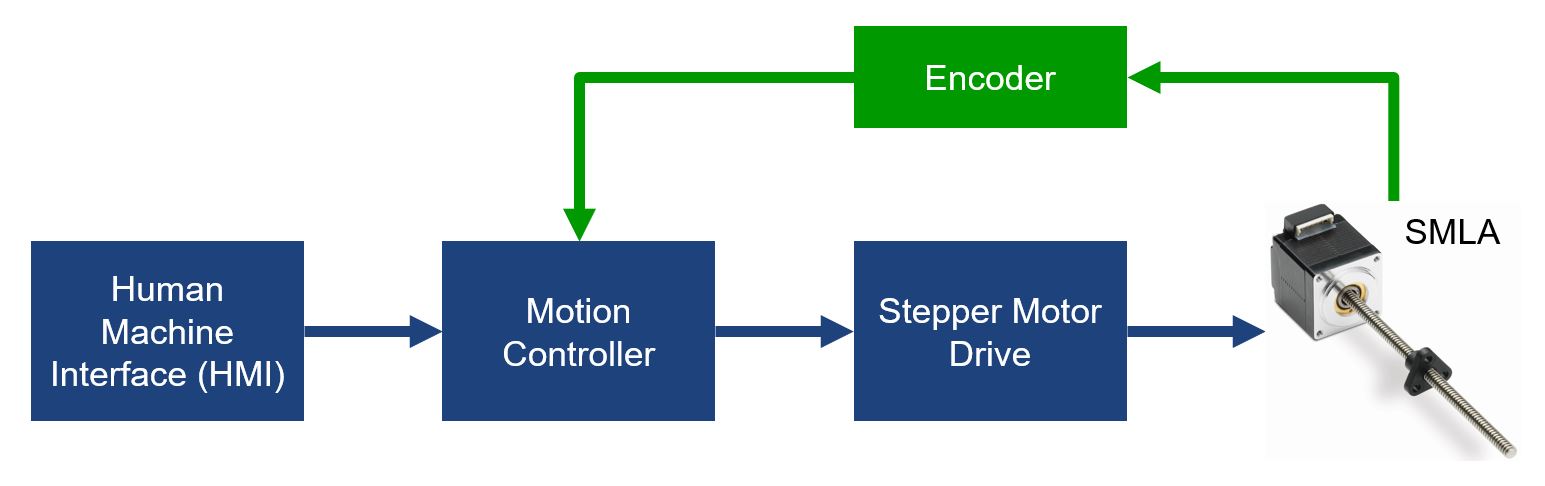
Figure 4 : architecture d'un système en boucle fermée de base configuré pour piloter un SMLA. Image reproduite avec l'autorisation de Thomson Industries, Inc.
Obtention de la position avec des codeurs
Il existe deux principaux types de codeurs rotatifs : incrémentaux ou absolus. (Figure 5)
Les codeurs rotatifs incrémentaux utilisent un disque rotatif relié à un arbre et positionné entre une source lumineuse et un photodétecteur. Plusieurs fentes disposées uniformément autour du périmètre du disque permettent à la lumière de passer vers le détecteur sous forme de motifs d'impulsions représentant les caractéristiques de mouvement.
Les applications nécessitant des données de mouvement encore plus détaillées ou un niveau supplémentaire de protection, en cas de panne de courant, bénéficieraient davantage d'un codeur absolu. Comme les codeurs incrémentaux, les codeurs absolus sont montés de manière centrale pour tourner avec l'arbre du moteur entre une source lumineuse et un photodétecteur. Au lieu d'utiliser des fentes disposées uniformément, comme un codeur incrémental, les codeurs absolus utilisent un agencement complexe d'ouvertures uniques sur une surface beaucoup plus grande du disque. Ils interrompent les signaux lumineux selon des motifs qu'une puce de détection peut lire comme des représentations plus fidèles de chaque position angulaire de la course, même sans dispositif de retour en position initiale.
Figure 5 : les processus pour les codeurs incrémentaux (à gauche) et absolus (à droite) sont illustrés ci-dessus. Image reproduite avec l'autorisation de Thomson Industries, Inc.
Mise en œuvre de codeurs rotatifs
Dans de nombreux cas, les codeurs peuvent être intégrés dans les trois types de configuration de SMLA (MLS, MLN et MLA). Seule une surface plane est nécessaire pour boulonner le corps du codeur et un arbre sur lequel monter le disque optique. L'arbre doit être une extension de l'arbre du moteur d'origine pour que le disque optique puisse tourner avec lui en vue de capturer le mouvement du moteur avec précision, comme illustré à la Figure 6.
Figure 6 : installation d'un codeur sur un moteur pré-équipé avec l'arbre saillant et les surfaces de montage requises. Image reproduite avec l'autorisation de Thomson Industries, Inc.
SMLA avec codeurs optiques ajoutés (de gauche à droite : MLS, MLN et MLA). Image reproduite avec l'autorisation de Thomson Industries, Inc.
Intensification
Même si les systèmes SMLA en boucle ouverte conviennent à de nombreuses applications, les utilisateurs de moteurs pas à pas souhaitant une rétroaction en temps réel sur la position de la charge doivent envisager d'ajouter des codeurs à leurs moteurs. Les codeurs peuvent fournir un retour de position, des données en temps réel sur la vitesse, la direction et d'autres caractéristiques, tout en améliorant le contrôle et la surveillance de la charge. Pour une rétroaction de positionnement de base, les utilisateurs doivent utiliser des codeurs incrémentaux, mais en cas de nécessité d'une précision élevée ou de la capacité de maintenir la position une fois l'équipement sous tension, ils doivent envisager des codeurs absolus.
La fermeture de la boucle de rétroaction au moyen de codeurs rotatifs optiques répond non seulement aux exigences des applications de précision actuelles, mais elle fait également des SMLA des composants précieux dans le paysage en constante évolution de l'industrie 4.0 et de l'innovation en matière de connectivité numérique, en assurant leur pertinence et leur efficacité continues au sein de la prochaine génération d'automatisation industrielle.