

Os atuadores lineares de motor de passo (SMLAs) combinam um motor de passo, um parafuso de avanço de precisão e uma porca em um envelope compacto, fornecendo uma solução altamente configurável, personalizável e robusta para movimento linear. Com a ajuda de um controlador de movimento e um driver de passo, todos os SMLAs podem ser programados para posicionar uma carga em um local preciso. Entretanto, as configurações padrão não fornecem um mecanismo de feedback que informe ao operador se o movimento foi concluído ou não.
Embora não seja essencial para muitas aplicações, o feedback pode ser uma ferramenta poderosa para uso em sistemas de movimento linear mais sofisticados. Por isso e pela crescente demanda por informações precisas sobre posicionamento de carga, equipar um SMLA com um codificador pode ser uma solução eficaz e simples para obter feedback de movimento em tempo real sobre sua aplicação.
Configurações principais do SMLA
A Figura 1 mostra três das construções de SMLA mais comuns: um parafuso de avanço motorizado (MLS), uma porca de avanço motorizada (MLN) e um atuador linear motorizado (MLA). Cada uma dessas construções tem um motor de passo, um parafuso de avanço e uma porca em seu núcleo, mas diferem na forma como obtêm movimento.
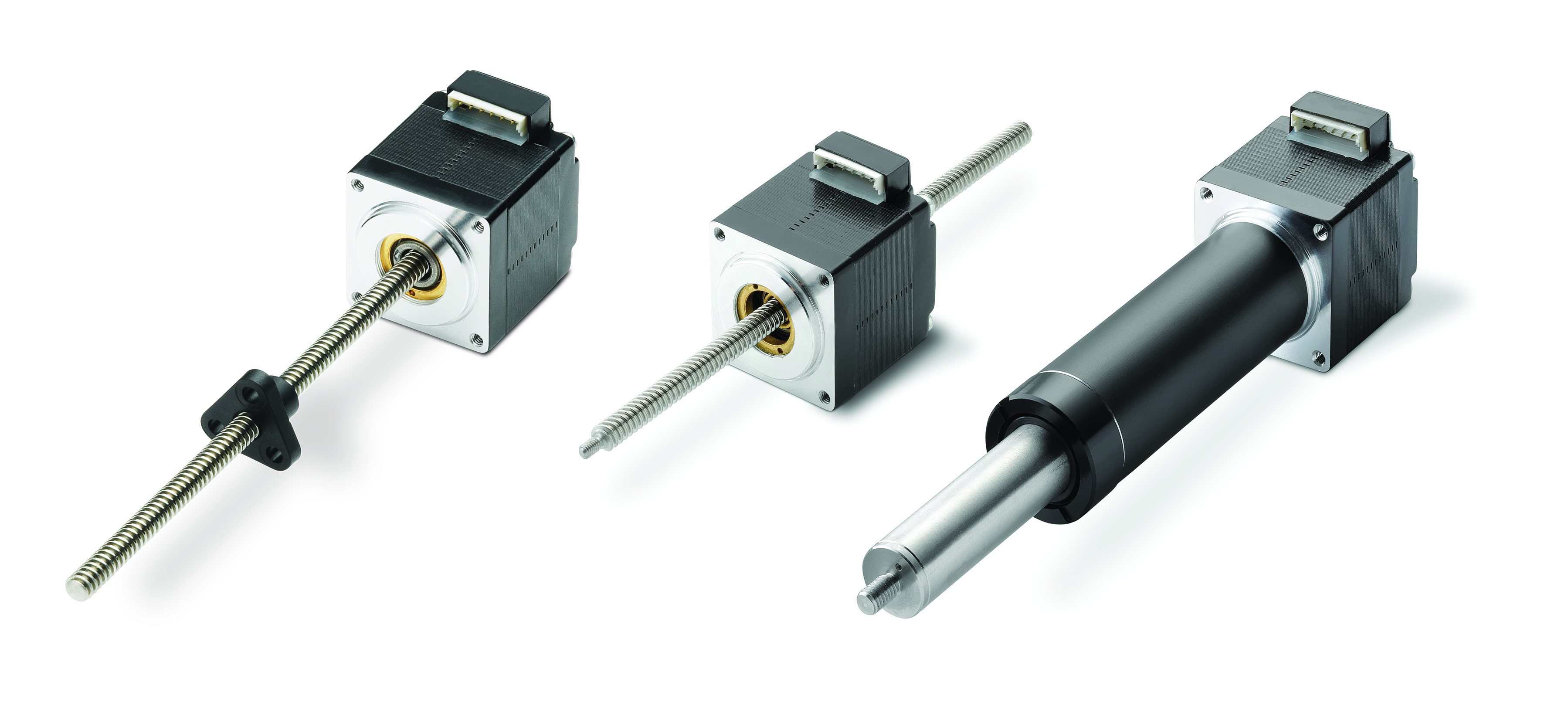
Figura 1. Tipos de SMLA (da esquerda para a direita: MLS, MLN e MLA). Imagem cedida pela Thomson Industries, Inc.
Para unidades MLS, o parafuso de avanço é fixado diretamente ao eixo do motor, o que movimenta a porca durante a rotação. As unidades MLN integram a porca dentro do eixo do motor que, quando girada, movimenta o parafuso de avanço em vez da porca. As configurações MLA são essencialmente unidades MLS com componentes adicionais que abrigam o parafuso de avanço e a porca, além de fornecer suporte e orientação integrados.
Atuação linear em circuito aberto
A Figura 2 descreve a arquitetura SMLA de circuito aberto que se aplica a todas as configurações. Os usuários interagem com o sistema por meio de uma interface homem-máquina (IHM). Eles programam a sequência de movimento desejada no controlador de movimento, que a envia ao acionamento do motor de passo para conversão e amplificação antes de transmiti-la ao SMLA, que realiza os movimentos. O caminho de comunicação é unidirecional; nem o controlador de movimento nem a IHM recebem qualquer notificação de que o movimento pretendido foi concluído com sucesso.
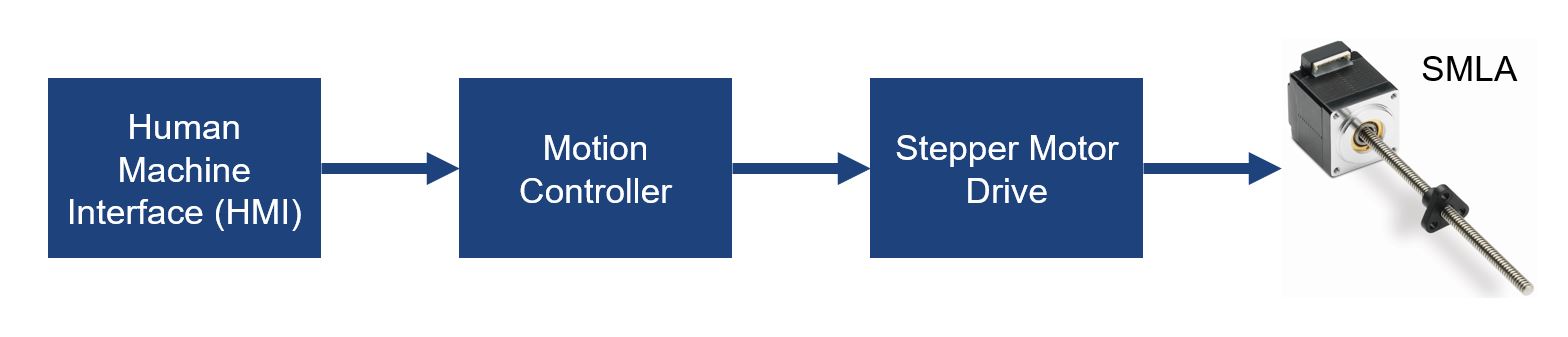
Figura 2: Arquitetura para uma configuração básica de sistema de circuito aberto para acionar um SMLA. Imagem cedida pela Thomson Industries, Inc.
Saber exatamente onde uma carga está posicionada é essencial para muitas aplicações de alta precisão, como instrumentos médicos, dispositivos de medição e equipamentos de laboratório. Além disso, determinados aplicativos podem desligar inesperadamente ou ter sua carga forçada para fora da posição. Nesses cenários, seria impossível saber a posição exata da carga sem usar um mecanismo de feedback.
Um bom exemplo de uma aplicação que se beneficia da funcionalidade de um codificador é uma máquina de pipetagem automatizada. (Figura 3) Esses dispositivos usam um codificador no eixo horizontal para rastrear com precisão a localização da pipeta de distribuição e garantir que o fluido seja transferido para o tubo de ensaio apropriado. Outros exemplos incluem bombas de fluidos, impressoras 3D e estágios XY.
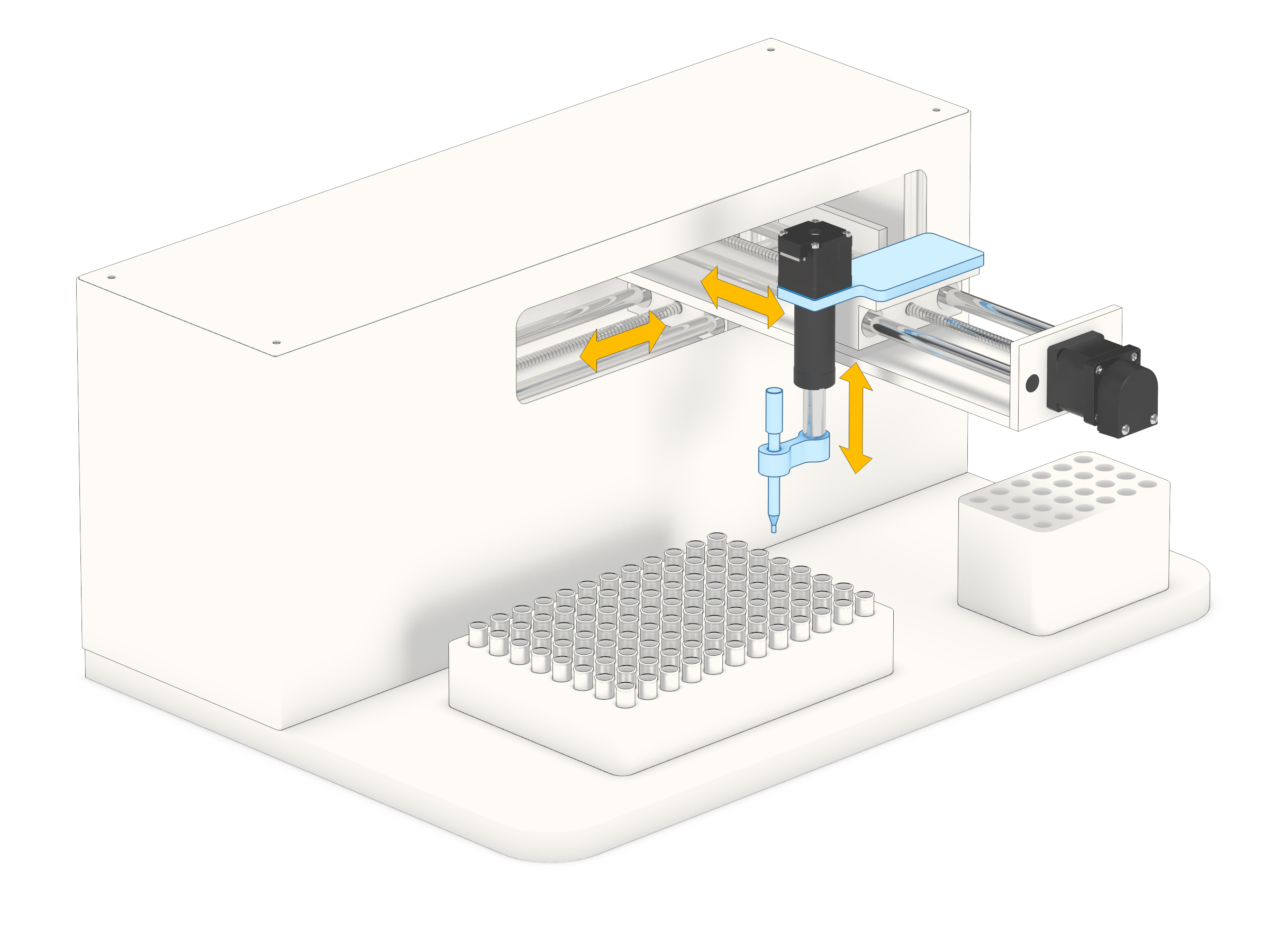
Figura 3: Máquinas de pipetagem automatizadas podem usar um codificador em seu eixo horizontal. Imagem cedida pela Thomson Industries, Inc.
Fechando o circuito com codificadores rotativos ópticos
Muitos SMLAs podem ser equipados para fornecer feedback adicionando um codificador rotativo. Codificadores rotativos, também conhecidos como codificadores de eixo, convertem a posição angular de um eixo em sinais de saída analógicos ou digitais. Os codificadores rotativos ópticos são a opção mais comum para adicionar funcionalidade de feedback aos conjuntos SMLA. A Figura 4 ilustra como adicionar um codificador a um SMLA pode fornecer feedback ao controlador e compartilhar dados de movimento importantes, como posição, velocidade ou direção.
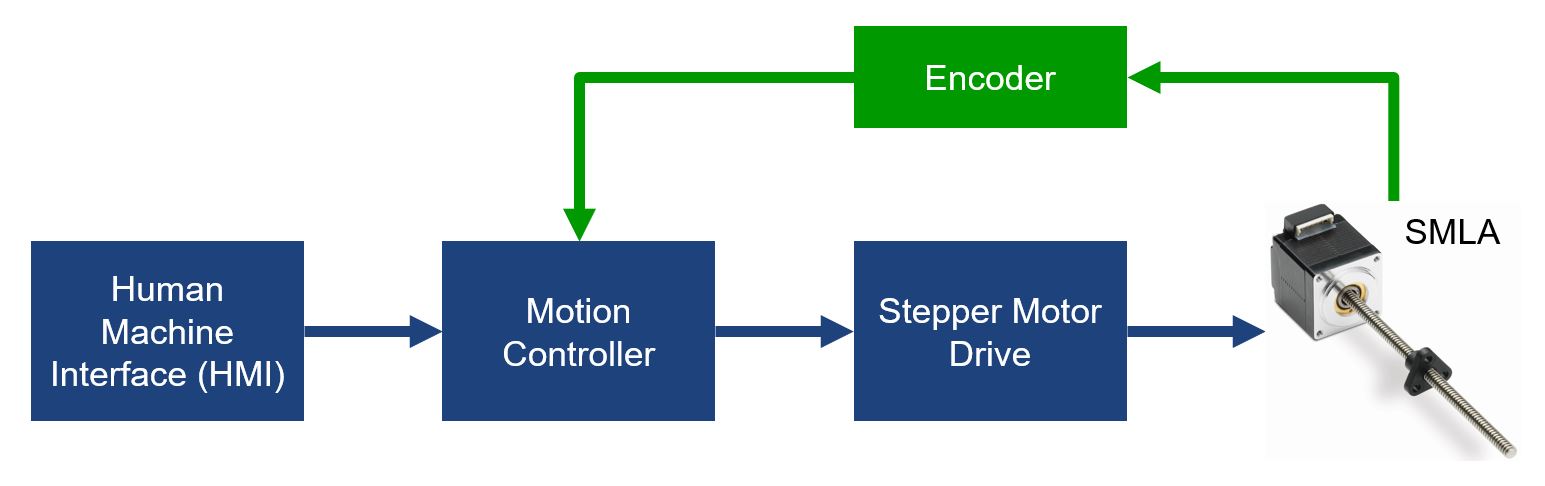
Figura 4: Arquitetura para uma configuração básica de sistema de circuito fechado para acionar um SMLA. Imagem cedida pela Thomson Industries, Inc.
Posicionando com codificadores
Existem dois tipos principais de codificadores rotativos: incrementais ou absolutos. (Figura 5)
Os codificadores rotativos incrementais usam um disco giratório conectado a um eixo e posicionado entre uma fonte de luz e um fotossensor. Várias fendas dispostas uniformemente ao redor do perímetro do disco permitem que a luz passe para o sensor em padrões de pulsos que representam características de movimento.
Aplicações que exigem dados de movimento ainda mais detalhados ou um nível adicional de proteção, caso haja perda de energia, se beneficiariam de um codificador absoluto. Assim como os codificadores incrementais, os codificadores absolutos são montados no centro para girar com o eixo do motor entre uma fonte de luz e um fotossensor. Em vez de usar fendas dispostas uniformemente como um codificador incremental, os codificadores absolutos usam um arranjo complexo de aberturas exclusivas sobre uma superfície muito maior do disco. Eles interrompem os sinais de luz em padrões que um chip detector pode ler como representações de alta fidelidade de cada posição angular do curso – mesmo sem um dispositivo de homing.
Figura 5: Os processos para codificadores incrementais (esquerda) e absolutos (direita) são ilustrados acima. Imagem cedida pela Thomson Industries, Inc.
Implementação de codificadores rotativos
Em muitos casos, os codificadores podem ser integrados em todos os três tipos de configuração SMLA (MLS, MLN e MLA). É necessária apenas uma superfície plana para aparafusar o corpo do codificador e um eixo para montar o disco óptico. O eixo deve ser uma extensão do eixo do motor original para que o disco óptico possa girar com ele para capturar o movimento do motor com precisão, conforme mostrado na Figura 6.
Figura 6: Instalação de um codificador em um motor pronto para codificador com o eixo saliente e as superfícies de montagem necessários. Imagem cedida pela Thomson Industries, Inc.
SMLAs com codificadores ópticos adicionados (da esquerda para a direita: MLS, MLN e MLA). Imagem cedida pela Thomson Industries, Inc.
Intensificando
Embora os sistemas SMLA de circuito aberto sejam adequados para muitas aplicações, os usuários de motores de passo que desejam feedback em tempo real sobre a posição da carga devem considerar adicionar codificadores aos seus motores. Os codificadores podem fornecer feedback de posição, dados em tempo real sobre velocidade, direção e outras características, ao mesmo tempo em que melhoram o controle e o monitoramento da carga. Para feedback de posicionamento básico, os usuários devem especificar codificadores incrementais, mas se for necessária alta precisão ou a capacidade de manter a posição depois que o equipamento for ligado, eles devem considerar codificadores absolutos.
Fechar o circuito de feedback com codificadores rotativos ópticos não apenas atende às demandas das aplicações de precisão atuais, como também posiciona os SMLAs como componentes valiosos no cenário em evolução da Indústria 4.0 e da inovação em conectividade digital, garantindo sua relevância e eficácia contínuas na próxima geração de automação industrial.