Thomson Linear Motion Optmized


Schrittmotor-Linearantriebe
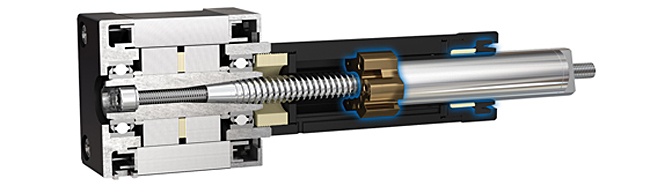
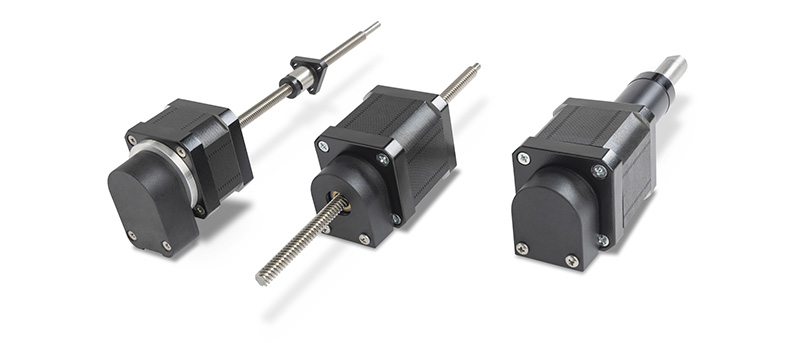
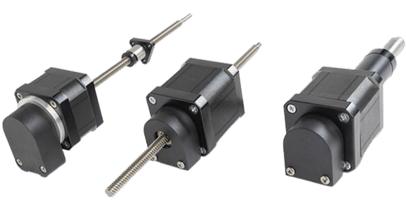
Thomson Schrittmotor-Linearantriebe kombinieren einen hybriden Schrittmotor mit einem präzisionsgefertigten Gewindetrieb zu einer kompakten Antriebslösung. Sie sind jetzt in drei Grundkonfigurationen erhältlich – angetriebene Spindel (MLS), angetriebene Mutter (MLN) und Aktuator-Version (MLA).
Schrittmotor-Linearantriebe - Standard
Aktuator (MLA)
Beim MLA handelt es sich um eine vollständig im Gehäuse untergebrachte Antriebslösung – zur Modell-Auswahl legen Sie einfach den Hub, den Verstellweg pro Schritt bzw. Umdrehung und den Präzisionsgrad fest.

Angetriebene Spindel (MLS)
Bei der MLS-Ausführung dreht der Schrittmotor eine Gewindespindel und bewegt damit eine an der Gewindemutter befestigte Last auf linearer Achse.
Angetriebene Mutter (MLN)
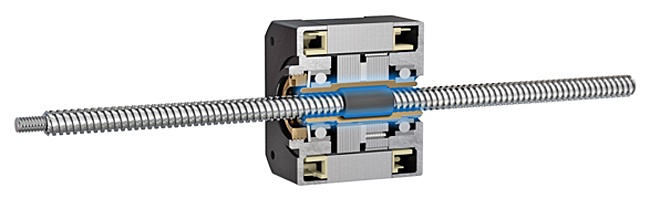
MLN-Einheiten arbeiten mit einer im Schrittmotorgehäuse drehenden Mutter. Die Bewegung erfolgt entweder durch Fixierung des Schrittmotors und Verfahren der an der Gewindemutter befestigten Last – oder durch Fixieren der Spindel und Verfahren einer am Motor befestigten Last.
Drehgeber als Standardoption erhältlich
Drehgeber liefern Echtzeitinformationen über Position, Geschwindigkeit und Richtung.
Sie können als Standardoption nahtlos auf der Rückseite aller drei Typen von
Thomson-Schrittmotor-Linearantriebsbaugruppen vormontiert werden.
Weitere Informationen erhalten Sie beim Thomson-Kundensupport.
Schrittmotor-Linearantriebe - Sonderausführungen

Modernste Motor- und Gewindetriebtechnologie perfekt kombiniert: Vorkonfektionierte Schrittmotor-Linearantriebe liefern kompakte Linaraktorik für Präzisionsanwendungen.
Warum Thomson Schrittmotor-Linearantriebe?
Thomson hat drei Grundkonfigurationen im Programm – angetriebene Spindel (MLS), angetriebene Mutter (MLN) und Aktuator-Version (MLA). Mit ihrer offenen Architektur eignen sich die Motor-Gewindetriebe mit angetriebener Spindel bzw. Mutter, wenn eine externe Führung vorhanden oder eine hohe Flexibilität gefordert ist. Demgegenüber vereinfacht die geschlossene Aktuator-Ausführung das Design und kommt ohne externe Führungen aus.Sonderausführungen
Thomson arbeite regelmäßig mit Erstausrüstern (OEMs) aus aller Welt zusammen, um Probleme zu lösen, die Effizienz zu steigern und die Wertschöpfung für die Endkunden zu maximieren. Nutzen Sie unsere Technologie und Anwendungserfahrung, um jenseits von Standardlösungen die Anforderungen ihres nächsten Produkts zu erfüllen.Wo fangen Sie am besten an?
Thomson unterstützt Sie mit umfassenden Online-Quellen – ganz gleich, an welcher Stelle im Entscheidungsprozess Sie sich gerade befinden:VIDEO: Konfigurationsvarianten der Schrittmotor-Linearantriebe
Präzisions-Gleitgewindetriebe können vielfältig mit einem Schrittmotor kombiniert werden. Um anwendungsspezifische Anforderungen abzudecken, sind die Thomson Schrittmotor-Linearantriebe in drei Konfigurationen (MLS, MLN, MLA) erhältlich. Erfahren Sie mehr dazu in diesem Video und finden Sie heraus, welche für Ihre Linearsysteme die meisten Vorteile bietet.

VIDEO: Was ist ein Schrittmotor und warum ist er ideal für lineare Aktorik?
In Kombination mit einem Präzisions-Gewindetrieb kommt der Schrittmotor in einer der wichtigsten Thomson-Produktreihen zum Einsatz – den Schrittmotor-Linearantrieben. Werfen wir einen genaueren Blick auf diesen Motor, seine Hauptkomponenten und deren Funktionsweise – und warum er, verglichen mit anderen Motortypen, ideal für die Linear-Aktorik geeignet ist.

VIDEO: Schrittmotor-Linearantrieb mit TaperLock
Dieses Video zeigt Ihnen die korrekte Wartung der Thomson Schrittmotor-Linearantriebe vor Ort. Die präzisionsgefertigten Einheiten kombinieren einen hybriden Schrittmotor und eine Leitspindel zu einem kompakten Modul. Das Ergebnis ist eine Lösung, die kleiner, stärker und effizienter ist als konkurrierende Technologien.

Technische Artikel
-
Konfigurierbarkeit von Schrittmotor-Linearantrieben effizient nutzen
Konstrukteure und Integratoren, die einen unkomplizierten, flexiblen und kompakten Linearantrieb benötigen, wählen häufig Schrittmotor-Linearantriebe (SMLAs). Die hohe Konfigurierbarkeit zählt zu den besonderen Stärken von SMLAs, aber das Durchforsten zahlloser Konfigurationsmöglichkeiten bis zur optimalen Lösung für einen bestimmten Anwendungszweck kann selbst für erfahrene Ingenieure zur Mammutaufgabe werden. Kennt man jedoch die individuellen Möglichkeiten und Grenzen jedes SMLA-Typs, wird es deutlich einfacher, deren breitgefächerte Flexibilität maximal zu nutzen.
-
Einbau einer Verdrehschutzführung für Schrittmotor-Linearantriebe
Die Kombination von Gewindetrieben mit Schrittmotoren ist eine einfache und kosteneffizient Methode, präzise Linearbewegungen zu erzeugen. Für diese Präzision ist jedoch eine Vorrichtung als Verdrehschutz erforderlich, die entweder extern vom Anwender hinzugefügt oder bereits vom Gerätehersteller integriert werden muss. Um zu entscheiden, welche Variante sinnvoll ist, müssen Sie die Notwendigkeit eines Führungssystems analysieren und die Vor- und Nachteile der einzelnen Möglichkeiten gegeneinander abwägen.
-
Reduzieren Sie Ihre linearen Antriebsbaugruppen auf eine einzige Komponente – mit motorbetriebenen Linearantrieben.
Wenn es darum geht, Linearbewegungen in einer Maschine zu spezifizieren, stehen Systementwicklern viele Möglichkeiten zur Auswahl. Die richtige Wahl kann sich auf die Montagefreundlichkeit, den Platzbedarf und die Betriebskosten auswirken. Ein üblicher Antriebsmechanismus für eine lineare Bewegung ist eine Baugruppe aus Schrittmotor und einem extern gelagerten Gleitgewindetrieb. Eine einfachere und montagefreundlichere Lösung ist jedoch ein Antriebsmechanismus mit integrierter Führung und Abstützung, der dafür normalerweise benötigte externe Komponenten überflüssig macht und somit die Komplexität senkt.
Schrittmotor-Linearantriebe – technische Daten (Zoll)
| S = Angetriebene Spindel (MLS), N = Angetriebene Mutter (MLN), A = Aktuator-Version (MLA) | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Hubweg/Vollschritt [µZoll] / Full Step (μ in.) |
Steigung (mm) |
Steigungskennung (mm) |
Motor | |||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | |||||||||
| Durchmesser-Kennung [Hundertstel-Zoll] | ||||||||||||
| 18 | 18 | 25 | 25 | 31 | 37 | 31 | 37 | 43 | 50 | |||
| 0.063² | 0.013 | 0013 | S,A¹³ | S,N,A¹³ | S¹³ | S¹³ | S,N¹³ | S,N,A¹³ | S¹³ | |||
| 0.125² | 0.025 | 0025 | S,A¹³ | S,N,A¹³ | S¹ | S,N,A¹ | S¹³ | |||||
| 0.157 | 0.031 | 0031 | S,A | S,N,A | S¹ | S,N,A¹ | ||||||
| 0.165 | 0.033 | 0033 | S¹ | |||||||||
| 0.179 | 0.036 | 0036 | S,A¹³ | S,N,A¹³ | ||||||||
| 0.200 | 0.040 | 0040 | S¹ | S,N,A¹ | ||||||||
| 0.209 | 0.042 | 0042 | S,A¹³ | S,N,A¹³ | S¹³ | S¹³ | S,N¹³ | S,N,A¹³ | ||||
| 0.250 | 0.050 | 0050 | S,A | S,N | S,A¹ | S,N,A¹ | S¹ | S,N,A¹ | S¹³ | S¹³ | ||
| 0.313 | 0.063 | 0063 | S,A¹ | S,N,A¹ | S | S,N,A | S¹ | |||||
| 0.357 | 0.071 | 0071 | S,A¹ | S,N,A¹ | ||||||||
| 0.394 | 0.079 | 0079 | S,A¹ | S,N,A¹ | S¹ | S,N,A¹ | ||||||
| 0.417 | 0.083 | 0083 | S | S¹ | S,N | S,N,A¹ | ||||||
| 0.490 | 0.098 | 0098 | S¹ | |||||||||
| 0.500 | 0.100 | 0100 | S,A | S,N | S | S,N,A | S¹ | |||||
| 0.591 | 0.118 | 0118 | S,A¹ | S,N,A¹ | ||||||||
| 0.625 | 0.125 | 0125 | S,A¹ | S,N¹ | S,A | S,N,A | S¹ | S,N,A¹ | S¹ | |||
| 0.787 | 0.157 | 0157 | S,A¹ | S,N,A¹ | ||||||||
| 0.833 | 0.167 | 0.167 | S | S | S,N | S,N,A | ||||||
| 0.960 | 0.192 | 0.192 | S,A¹ | S,N,A¹ | ||||||||
| 1.000 | 0.200 | 0200 | S,A | S,N | S,A¹ | S,N,A¹ | S¹ | S,N,A¹ | S¹ | |||
| 1.180 | 0.236 | 0236 | S¹ | |||||||||
| 1.250 | 0.250 | 0250 | S,A¹ | S,N,A¹ | S | S | S,N | S,N,A | S¹ | S¹ | ||
| 1.500 | 0.300 | 0.300 | S¹ | S,N,A¹ | ||||||||
| 1.665 | 0.333 | 0.333 | S,A¹³ | S,N¹³ | ||||||||
| 1.875 | 0.375 | 0.375 | S,A¹³ | S,N¹³ | S¹ | S,N,A¹ | ||||||
| 2.000 | 0.400 | 0.400 | S,A | S,N | ||||||||
| 2.500 | 0.500 | 0500 | S,A¹³ | S,N¹³ | S,A | S,N,A | S | S | S,N | S,N,A | S¹ | S¹ |
| 3.750 | 0.750 | 0750 | S,A¹³ | S,N,A¹³ | S¹³ | S,N,A¹³ | ||||||
| 4.000 | 0.800 | 0.800 | S¹³ | |||||||||
| 5.000 | 1.000 | 1000 | S³ | S³ | S,N³ | S,N,A³ | S¹³ | |||||
| 6.000 | 1.200 | 1.200 | S¹³ | S,N,A¹³ | ||||||||
| 7.500 | 1.500 | 1.500 | S¹³ | |||||||||
1. Einige Steigungen sind eventuell im Hochleistungs-Mutternwerkstoff, in Konfigurationen mit angetriebener Mutter (MLN) oder einigen spielfreien Muttern nicht verfügbar. Weitere Informationen erhalten Sie von Thomson.
2. Feingewindespindeln können deutlich geringere Tragzahlen im Vergleich zu herkömmlichen Spindeln aufweisen.
3. Spindel in Präzisionsgenauigkeit (P) nicht verfügbar
Schrittmotor-Linearantriebe – technische Daten (metrisch)
| S = Angetriebene Spindel (MLS), N = Angetriebene Mutter (MLN), A = Aktuator-Version (MLA) | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Hubweg/Vollschritt [µZoll] / Full Step (mm) |
Steigung (mm) |
Steigungskennung (mm) |
Motor | ||||||||
| MLxX8 | MLx11 | MLx14, MLx17 | MLx23 | ||||||||
| Durchmesser-Kennung | |||||||||||
| M04 | M04 | M06 | M06 | M08 | M10 | M08 | M10 | M12 | |||
| 3 | 0.6 | 006 (0024) | S,A¹ | S,N,A¹ | |||||||
| 5 | 1.0 | 010 (0039) | S | S,N | S,A | S,N,A | |||||
| 6 | 1.2 | 012 (0047) | S,A¹ | S,N,A¹ | |||||||
| 10 | 2.0 | 020 (0079) | S | S | S,N | S,N,A | S¹ | ||||
| 15 | 3.0 | 030 (0118) | S | S,N,A | S¹ | ||||||
| 20 | 4.0 | 040 (0157) | S | S,N | S | S,N | S¹ | ||||
| 25 | 5.0 | 050 (0197) | S | S,N,A | |||||||
| 30 | 6.0 | 060 (0236) | S,A | S,N,A | S¹ | S,N,A¹ | S¹ | ||||
| 40 | 8.0 | 080 (0315) | S³ | S,N³ | S | S,N | |||||
| 50 | 10.0 | 100 (0394) | S | S,N,A | S¹ | ||||||
| 60 | 12.0 | 120 (0472) | S,A | S,N,A | S | S¹ | S,N | S,N,A¹ | |||
| 75 | 15.0 | 150 (0591) | S¹ | ||||||||
| 80 | 16.0 | 160 (0630) | S¹ | ||||||||
| 90 | 18.0 | 180 (0709) | S,A¹³ | S,N,A¹³ | |||||||
| 100 | 20.0 | 200 (0787) | S³ | S | S,N³ | S,N,A | |||||
| 125 | 25.0 | 250 (0984) | S¹³ | ||||||||
| 175 | 35.0 | 350 (1378) | S¹³ | S,N,A¹³ | |||||||
| 225 | 45.0 | 450 (1772) | S¹³ | ||||||||
1. Einige Steigungen sind eventuell im Hochleistungs-Mutternwerkstoff, in Konfigurationen mit angetriebener Mutter (MLN) oder einigen spielfreien Muttern nicht verfügbar. Weitere Informationen erhalten Sie von Thomson.
2. Steigungskennung für MLA in Klammern.
3. Spindel in Präzisionsgenauigkeit (P) nicht verfügbar
Schrittmotor-Linearantriebe – Produkthighlights
- Erhöhte Drehmomentdichte
- Erhöhter Wirkungsgrad
- Angetriebene Spindel oder angetriebene Mutter
- Spindel-Sonderausführungen nach Kundenvorgabe erhältlich
- TaperLock-Vorteil
- Minimierte Geräuschentwicklung
- Zoll- oder metrische Größen verfügbar
Anwendungsbeispiele:
- Medizinische Geräte
- X-Y-Stufen
- 3D-Drucker
- HLK-Regelventile
- Pipettiervorrichtungen
- CNC-Maschinen
- Fluid-/Injektionspumpen
Choose Your CAD Model:
MLA

MLS

MLN
