

Konstrukteure und Integratoren, die einen unkomplizierten, flexiblen und kompakten Linearantrieb benötigen, wählen häufig Schrittmotor-Linearantriebe (SMLAs). Die hohe Konfigurierbarkeit zählt zu den besonderen Stärken von SMLAs, aber das Durchforsten zahlloser Konfigurationsmöglichkeiten bis zur optimalen Lösung für einen bestimmten Anwendungszweck kann selbst für erfahrene Ingenieure zur Mammutaufgabe werden. Kennt man jedoch die individuellen Möglichkeiten und Grenzen jedes SMLA-Typs, wird es deutlich einfacher, deren breitgefächerte Flexibilität maximal zu nutzen.
Warum SMLAs?
Viele Faktoren machen SMLAs zur prädestinierten Lösung für Linearaktorik, wobei ihre ausgeprägte Anpassbarkeit und Konfigurierbarkeit zu ihren größten Stärken zählen. Ihr effizientes Design erlaubt die Konfiguration unzähliger Kombinationen aus Motor, Spindel und Mutter zu einer für jede Anwendung maßgeschneiderten Baugruppe.
Darüber hinaus sind SMLAs so beliebt, weil ihr Schrittmotor häufig ausreichende Steuerungsmöglichkeiten bietet, ohne externe Rückführungsgeräte wie Drehgeber zu benötigen. So lässt sich beispielsweise ein Schrittmotor programmieren, mit verschiedenen Auflösungen eine exakte Position anzufahren, ohne eine Rückführung an eine Ansteuerung vorzusehen. Damit sinken sowohl die Kosten als auch die Komplexität im Vergleich zu Servos, bürstenlosen Gleichstrommotoren und sonstigen Motor-Ausführungen.
Schrittmotoren und Spindeln sind zudem von Haus aus kompatibel, was ebenfalls zur hohen Konfigurierbarkeit der SMLAs beiträgt. Diese prinzipbedingte Konformität wird besonders deutlich, wenn es um optimale Geschwindigkeitsbereiche, Tragzahlen und Positioniergenauigkeiten geht.
Damit nicht genug, bieten Spindeln und Schrittmotoren zahlreiche Anpassungsoptionen. Die Optionen der Spindel umfassen z. B. die Endenbearbeitung, Beschichtung, Genauigkeit sowie Gewindeform und -länge, während bei Schrittmotoren die Motorwicklungen auf Drehmoment und Drehzahl optimiert werden können, genauso wie eine anwendungsspezifische Wahl bezüglich Verdrahtung, Anschlussvarianten, Drehgeber und Lagerschild-Bearbeitung. Die Kombination aus Schrittmotor und Spindel erhöht somit deutlich die Anzahl möglicher Bauformen.
SMLA-Typen
Trotz der großen Anzahl möglicher Kombinationen werden SMLAs zunächst in drei unterschiedliche Ausführungen unterteilt: angetriebene Spindel, angetriebene Mutter und teleskopierend (Abbildung 1)
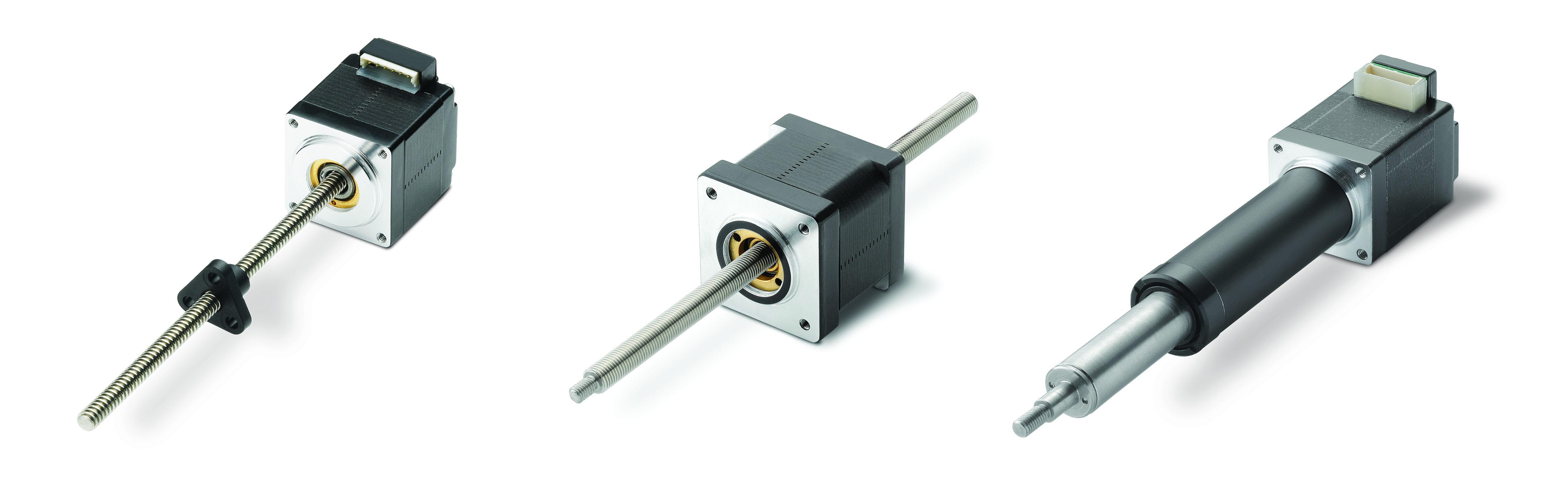
Abbildung 1 – die drei SMLA-Typen (v.l.n.r.: angetriebene Spindel, angetriebene Mutter und teleskopierend) verfügen über eine einzigartige Mechanik, ideal für verschiedene Anwendungsfälle.
Jeder SMLA-Typ enthält dieselben Basiskomponenten: einen Schrittmotor (1), eine Gewindespindel (2) und eine Gewindemutter (3); wie in den Abbildungen 2–4 zu sehen, unterscheiden sie sich hauptsächlich in der Rolle der Mutter.
Angetriebene Spindel – Aufbau und Mechanik
Die Konfiguration mit angetriebener Spindel, auch motorbetriebener Gewindetrieb, externer Linearantrieb, externe Mutter oder verfahrende Mutter genannt, bietet das höchste Maß an konstruktiver Flexibilität und Anpassbarkeit. Wie der Name schon sagt, erfolgt die Bewegung durch das Drehen der vom Motor angetriebenen Spindel. Wird die Mutter so geführt, dass sie sich nicht mit der Spindel mitdrehen kann, bewegt sie sich linear über die gesamte Gewindelänge der Spindel.
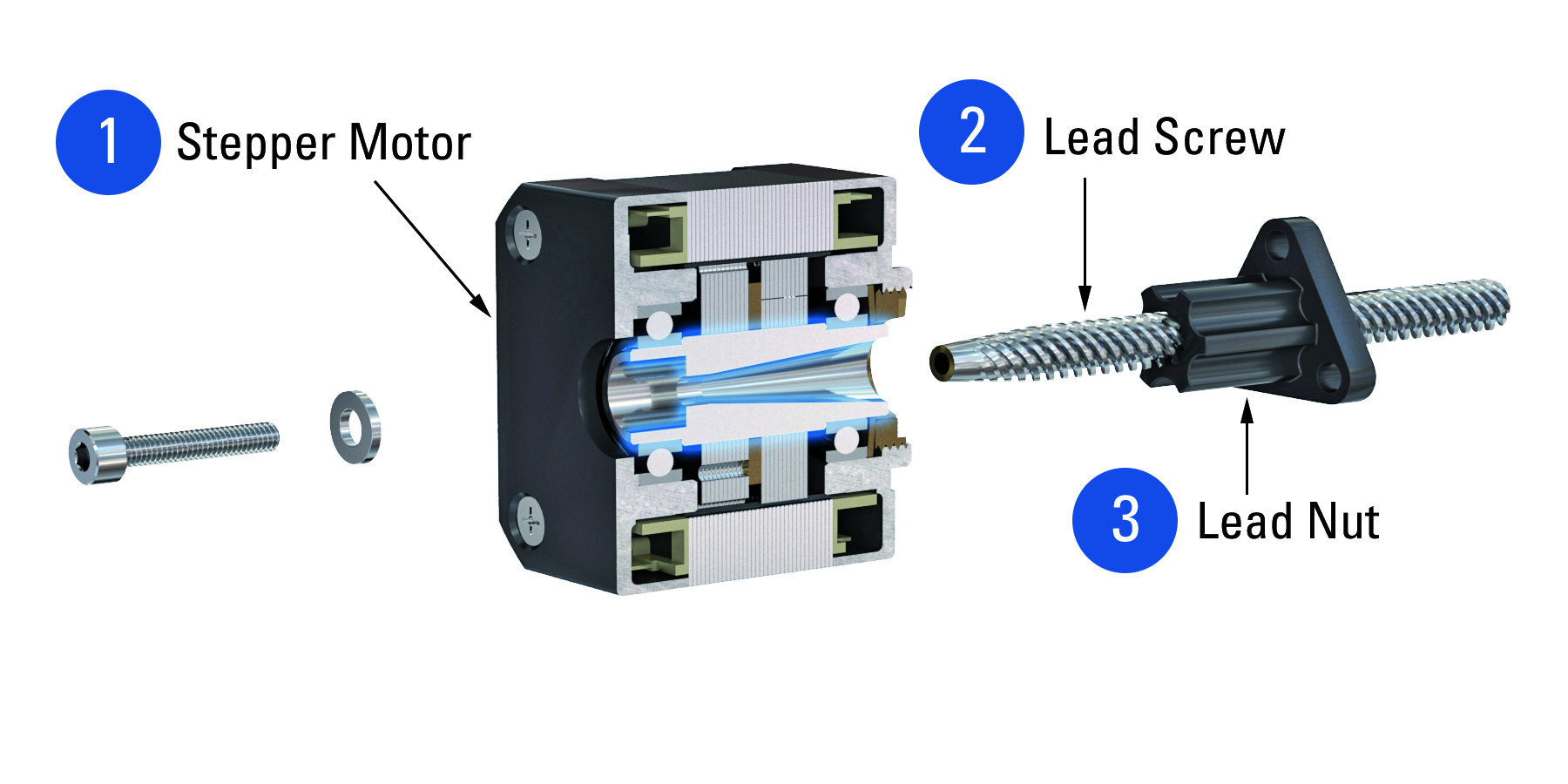
Abbildung 2 – Schnittzeichnung einer Konfiguration mit angetriebener Spindel.
Angetriebene Mutter – Aufbau und Mechanik
Die Baugruppe mit angetriebener Mutter ist die minimalistische und kompakteste Version der drei Konfigurationen. Diese Bauform bietet die kürzeste eingefahrene Länge und Einbaulänge, während die Rotation ihrer Komponenten praktisch unsichtbar ist. Andere Bezeichnungen für diesen Antriebstyp sind motorbetriebene Spindelmutter, Aktuator ohne Verdrehschutz, interne Mutter und verfahrende Spindel.
Die Mechanik eines SMLA mit angetriebener Mutter ist im Wesentlichen die Umkehrung der Konfiguration mit angetriebener Spindel. Bei laufendem Motor dreht sich die Mutter innerhalb der Motorwelle und sorgt dafür, dass sich die mit der Last verbundene Spindel durch den Motor bewegt.
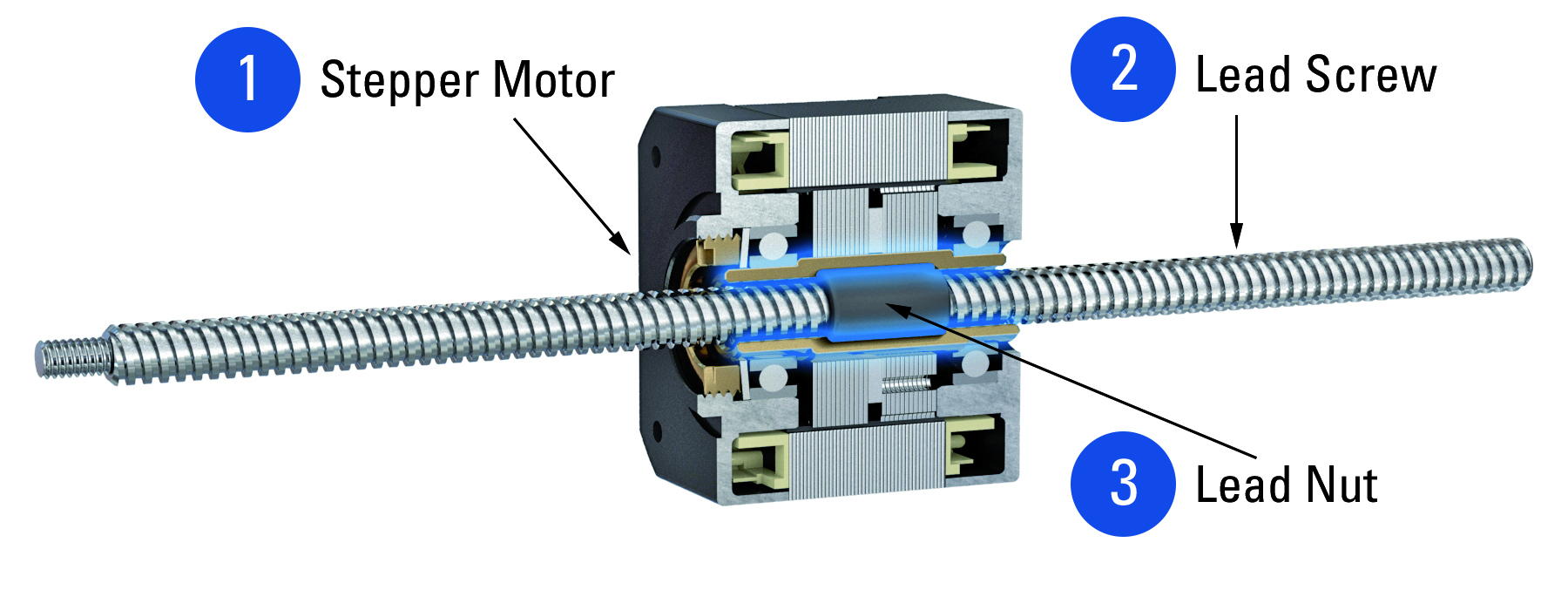
Abbildung 3 – Schnittzeichnung einer Konfiguration mit angetriebener Mutter.
Teleskopierend – Aufbau und Mechanik
Die teleskopierende Ausführung arbeitet eher wie der klassische in den meisten Industrieanwendungen verwendete Kolbenstangen-Aktuator, bietet aber dennoch die Vorteile einer konfigurierbaren Basiseinheit aus Schrittmotor und Gewindespindel. Im Kern ist die teleskopierende Variante eine Konfiguration mit angetriebener Spindel plus zusätzlicher Gehäusebauteile, die die Gewindemutter gegen Mitdrehen sichern und sie mittels einer eingebauten Lagerbuchse gegenüber Seiten- und Momentlasten abstützen. Durch diese direkt eingebaute Führung und Abstützung kommen diese Ausführungen in vielen Fällen ohne externe Komponenten aus, die andernfalls notwendig wären. Andere Bezeichnungen für diesen Antriebstyp sind motorbetriebener Spindel-Aktuator, Aktuator mit Verdrehschutz, elektrische Kolbenstange und Elektrozylinder.
Die Mechanik eines telekopierenden SMLA ähnelt der Konfiguration mit angetriebener Spindel. Der Hauptunterschied ist die integrierte Führung und Abstützung in Form eines Schutzrohrs mit eingegossenen Kerben und einer Kolbenstange mit Stützlagerbuchse, sodass auf externe Komponenten verzichtet werden kann.
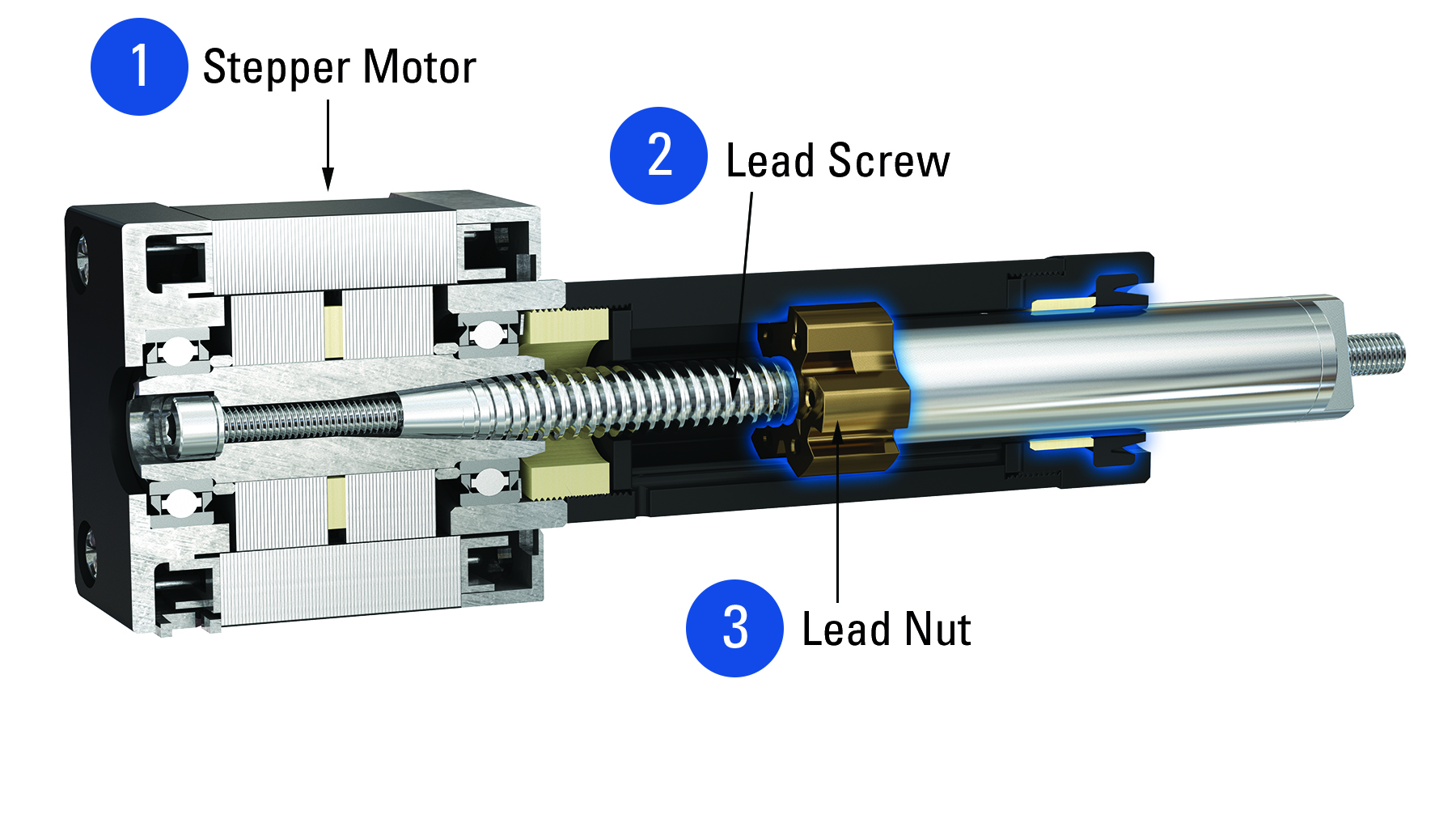
Abbildung 4 – Schnittzeichnung einer teleskopierenden Ausführung.
Montage
Für alle drei SMLA Konfigurationen gilt ein ähnlicher Montageprozess, der hauptsächlich darin besteht, den Motor zu montieren, die Spindel im Bedarfsfall abzustützen und die Last anzubauen. Die Unterschiede bestehen darin, wo die Last angebaut und wie sie abgestützt wird (Abbildung 5). Bei Konfigurationen mit angetriebener Spindel wird die Last an der Spindelmutter befestigt. Außerdem muss das Ende der Spindel bei größeren Längen mit einem Stehlager oder einer Buchse gestützt werden.
Bei der Konfiguration mit angetriebener Mutter wird die Last an der Spindel befestigt. Und bei der Teleskop-Konfiguration erfolgt der Anbau der Last an der Montageaufnahme an der Kolbenstange.
Die Konfigurationen mit angetriebener Spindel und Mutter können ausschließlich axiale Lasten aufnehmen. Daher ist für eine ordnungsgemäße Funktion eine Führung und Abstützung in Form von Linearlagern und Führungsschienen erforderlich. Da Teleskop-Aktuatoren bereits über eine eingebaute Führung und Abstützung verfügen, kann dort in vielen Fällen auf externe Linearlager und Führungsschienen verzichtet werden.
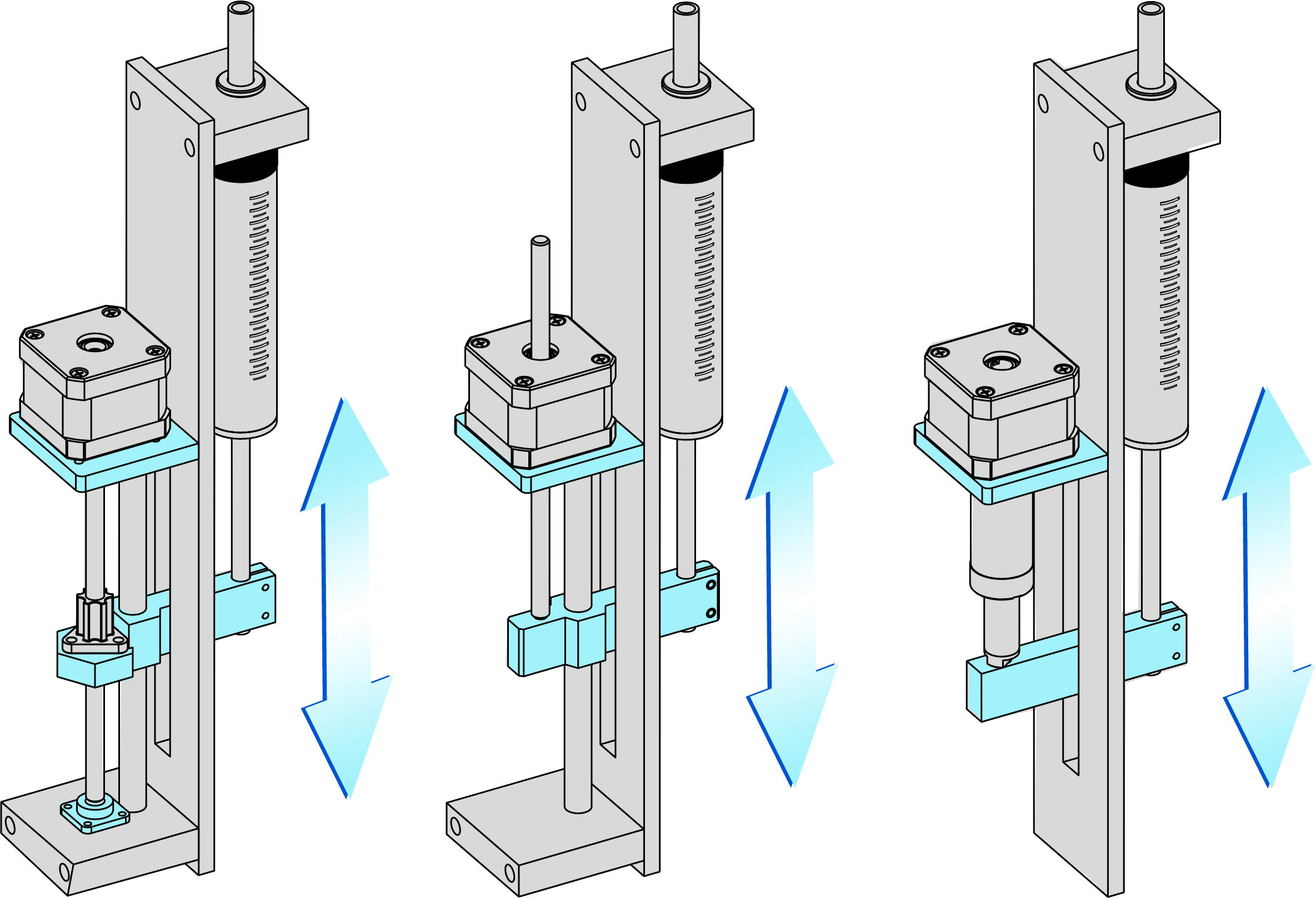
Abbildung 5 – Dieses Beispiel einer Fluidpumpe zeigt die typischen Anbaukonfigurationen für all drei SMLA-Typen (v.l.n.r.: angetriebene Spindel, angetriebene Mutter, Teleskop-Aktuator).
Anwendungstechnische Dimensionierung
Die flexible Konfigurierbarkeit der SMLAs eröffnet zahllose Anwendungsmöglichkeiten. Abbildung 6 zeigt einige gängige SMLA-Anwendungsbeispiele.
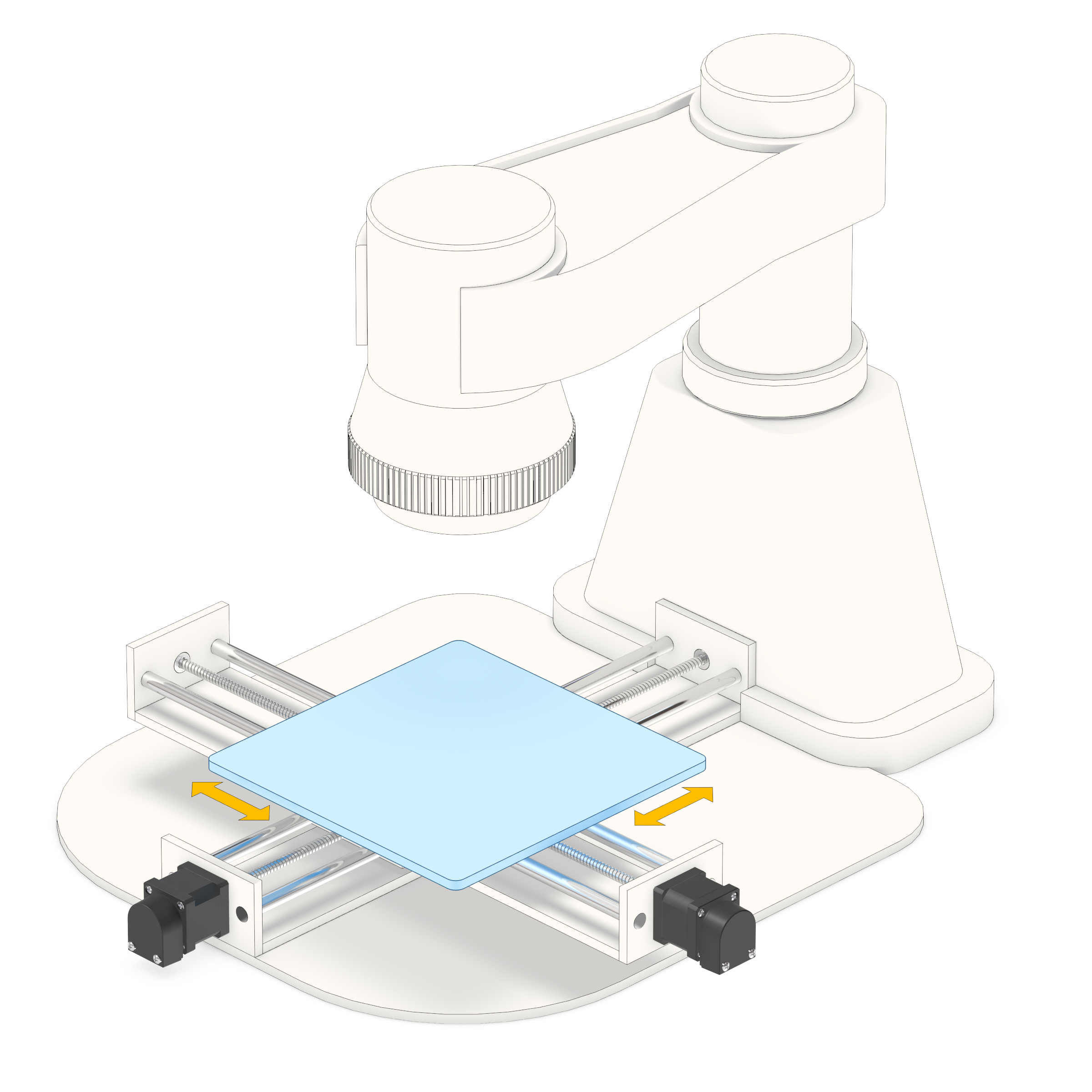
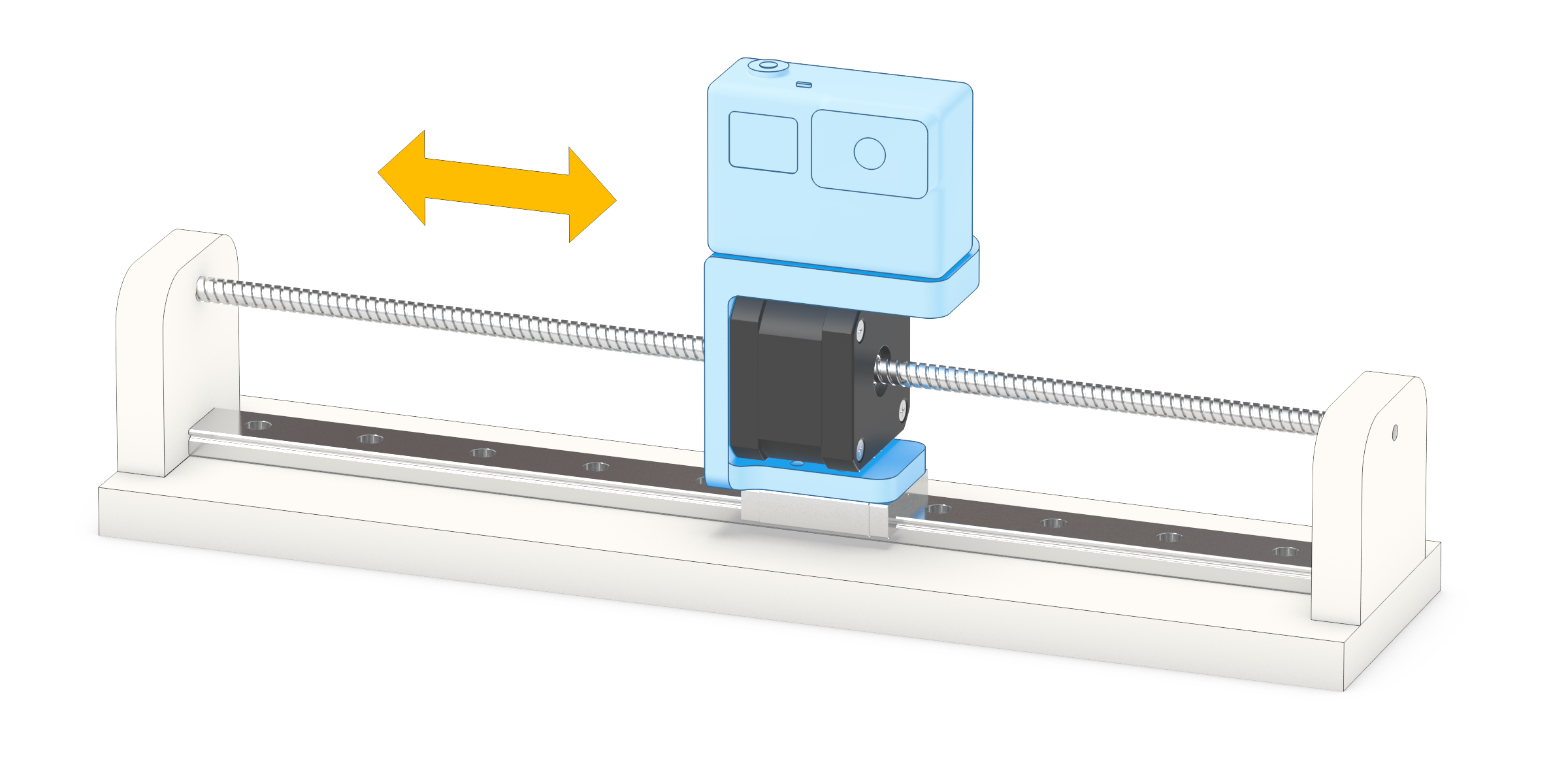
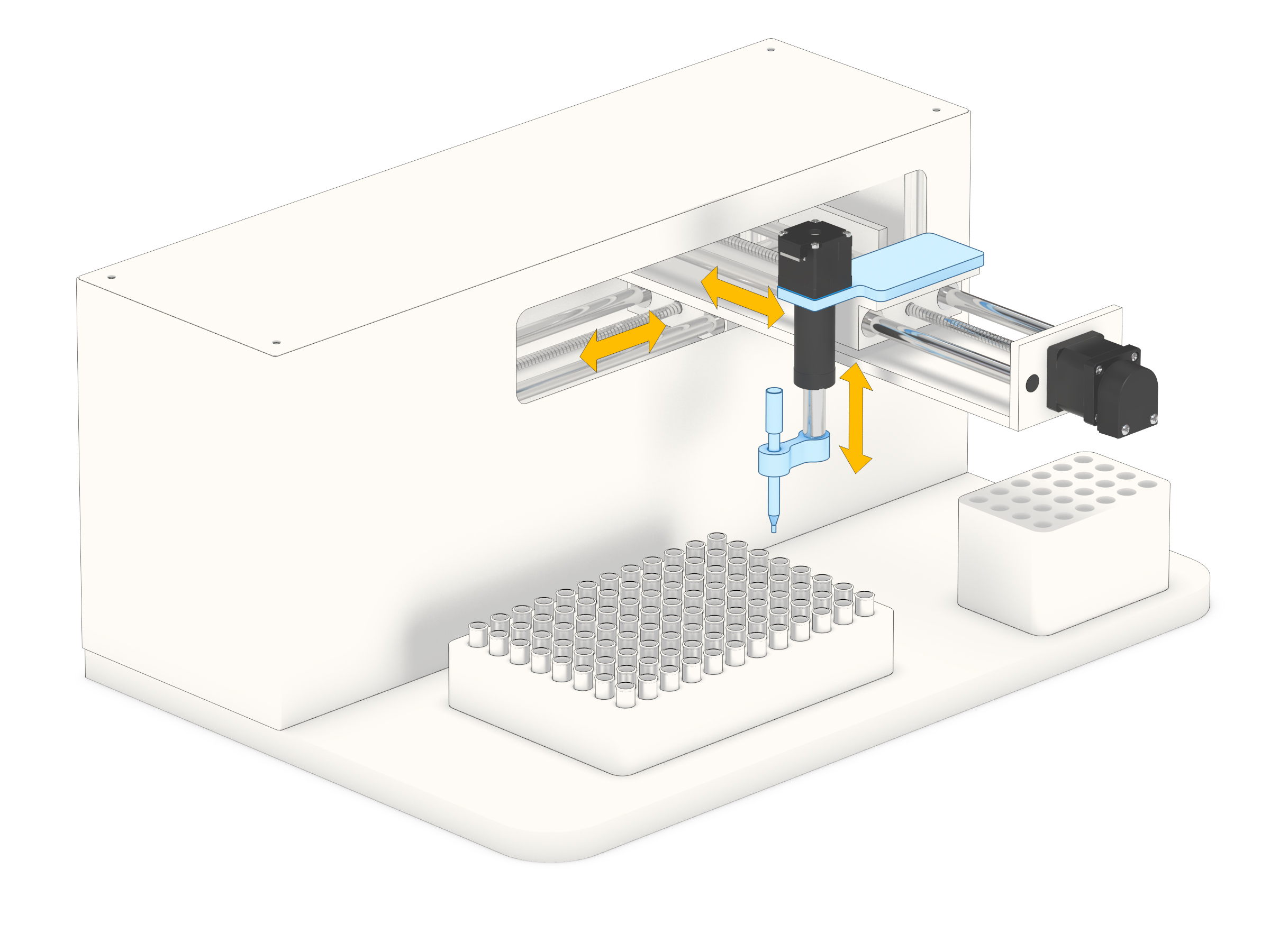
Abbildung 6 – Durch die Reduzierung der erforderlichen Komponenten sind SMLAs die ideale Lösung für eine Vielzahl von Anwendungen mit geringem Platzangebot zur Reduzieren, darunter (von links nach rechts): Kreuztische (rotierende Spindel), horizontale Positionierung (angetriebene Mutter) und Pipettierung (teleskopierende und angetriebene Spindel).
Bei der Dimensionierung eines SMLA für eine bestimmte Anwendung kommt es im Wesentlichen darauf an, die Limitierung von Motor, Spindel und Spindelmutter zu kennen. Für eine optimale Funktionsfähigkeit und lange Lebensdauer muss jede dieser Hauptkomponenten ausreichend dimensioniert sein. Glücklicherweise bieten die meisten Hersteller Diagramme zur theoretischen Leistung abhängig von diese Komponenten an, sodass die Dimensionierung eines Antriebs wenig Zeit beansprucht. In der Regel handelt es sich bei diesen Diagrammen um eine Geschwindigkeit/Last-Kurve, die den optimalen Leistungsbereich der Motor-, Spindel- und Mutter-Kombination hervorhebt.
SMLAs im Vergleich
SMLAs erlauben ein modulares Konstruktionskonzept für Linearantriebe, die den Entwicklern eine Lösung ermöglicht, die exakt auf die jeweiligen anwendungstechnischen Anforderungen zugeschnitten ist. Welcher der drei SMLA-Typen am besten geeignet ist, wird von vielen anwendungsspezifischen Faktoren bestimmt.
Wenn es darum geht, eine maximale Anpassbarkeit oder eine wirklich einzigartige Kombination der Komponenten zu finden, sind Antriebe mit angetriebener Spindel die erste Wahl. Varianten mit angetriebener Spindel sind der am häufigsten eingesetzte SMLA-Typ, sodass viele Konstrukteure damit bereits vertraut sein dürften.
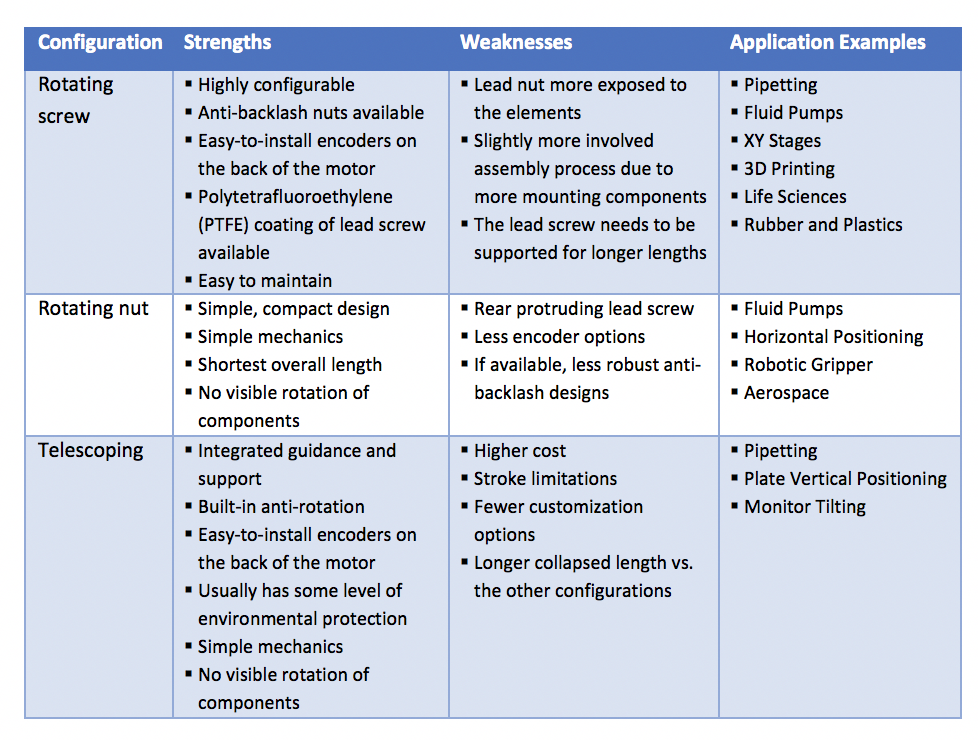
Anwendungen, die von einem kompakteren, einfacheren Linearantrieb profitieren und keine spielfreie Mutter oder viele Encoder-Optionen benötigen, sind möglicherweise mit einer angetriebenen Mutter besser bedient. Wird eine eher klassische Konstruktion mit Kolbenstange bevorzugt oder wenn die Anwendung eine integrierte Führung und Abstützung mit eingebautem Verdrehschutz verlangt, kommt dagegen eher die teleskopierende Variante in Frage. Diese Konfiguration bietet sich zudem an, wenn es darauf ankommt, die Gesamtzahl der Komponenten zu reduzieren, denn dank der integrierten Führung/Abstützung können externe Vorrichtungen eingespart werden. Tabelle 1 fasst die allgemeinen Vor- und Nachteile jeder SMLA-Konfiguration zusammen und gibt einige gängige Anwendungsbeispiele.
Um Konstrukteure und Integratoren im Dschungel der vielen Optionen zu unterstützen, bieten immer mehr SMLA-Hersteller Online-Tools an, mit denen sie schnell und einfach optimale Lösungen für ihre Anwendungen konfigurieren können. Es gibt zum Beispiel Online-Auswahltools, mit denen die Nutzer in wenigen Minuten den passenden SMLA für ihre Anwendung finden, und die zugleich den Zugriff auf Leistungskennkurven, 3D-Modelle, Preise und Lieferzeiten bieten.
Die Nutzung von automatisierten Auswahltools im Kontext der Bauweise, Mechanik, Montage und Auslegung der drei wichtigsten SMLA-Typen führt Konstrukteure und Integratoren sicher zur optimalen Wahl für ihre Anwendungen.
Konstrukteure und Integratoren, die einen unkomplizierten, flexiblen und kompakten Linearantrieb benötigen, wählen häufig Schrittmotor-Linearantriebe (SMLAs). Die hohe Konfigurierbarkeit zählt zu den besonderen Stärken von SMLAs, aber das Durchforsten zahlloser Konfigurationsmöglichkeiten bis zur optimalen Lösung für einen bestimmten Anwendungszweck kann selbst für erfahrene Ingenieure zur Mammutaufgabe werden. Kennt man jedoch die individuellen Möglichkeiten und Grenzen jedes SMLA-Typs, wird es deutlich einfacher, deren breitgefächerte Flexibilität maximal zu nutzen.
Warum SMLAs?
Viele Faktoren machen SMLAs zur prädestinierten Lösung für Linearaktorik, wobei ihre ausgeprägte Anpassbarkeit und Konfigurierbarkeit zu ihren größten Stärken zählen. Ihr effizientes Design erlaubt die Konfiguration unzähliger Kombinationen aus Motor, Spindel und Mutter zu einer für jede Anwendung maßgeschneiderten Baugruppe.
Darüber hinaus sind SMLAs so beliebt, weil ihr Schrittmotor häufig ausreichende Steuerungsmöglichkeiten bietet, ohne externe Rückführungsgeräte wie Drehgeber zu benötigen. So lässt sich beispielsweise ein Schrittmotor programmieren, mit verschiedenen Auflösungen eine exakte Position anzufahren, ohne eine Rückführung an eine Ansteuerung vorzusehen. Damit sinken sowohl die Kosten als auch die Komplexität im Vergleich zu Servos, bürstenlosen Gleichstrommotoren und sonstigen Motor-Ausführungen.
Schrittmotoren und Spindeln sind zudem von Haus aus kompatibel, was ebenfalls zur hohen Konfigurierbarkeit der SMLAs beiträgt. Diese prinzipbedingte Konformität wird besonders deutlich, wenn es um optimale Geschwindigkeitsbereiche, Tragzahlen und Positioniergenauigkeiten geht.
Damit nicht genug, bieten Spindeln und Schrittmotoren zahlreiche Anpassungsoptionen. Die Optionen der Spindel umfassen z. B. die Endenbearbeitung, Beschichtung, Genauigkeit sowie Gewindeform und -länge, während bei Schrittmotoren die Motorwicklungen auf Drehmoment und Drehzahl optimiert werden können, genauso wie eine anwendungsspezifische Wahl bezüglich Verdrahtung, Anschlussvarianten, Drehgeber und Lagerschild-Bearbeitung. Die Kombination aus Schrittmotor und Spindel erhöht somit deutlich die Anzahl möglicher Bauformen.
SMLA-Typen
Trotz der großen Anzahl möglicher Kombinationen werden SMLAs zunächst in drei unterschiedliche Ausführungen unterteilt: angetriebene Spindel, angetriebene Mutter und teleskopierend (Abbildung 1)
Abbildung 1 – die drei SMLA-Typen (v.l.n.r.: angetriebene Spindel, angetriebene Mutter und teleskopierend) verfügen über eine einzigartige Mechanik, ideal für verschiedene Anwendungsfälle.
Jeder SMLA-Typ enthält dieselben Basiskomponenten: einen Schrittmotor (1), eine Gewindespindel (2) und eine Gewindemutter (3); wie in den Abbildungen 2–4 zu sehen, unterscheiden sie sich hauptsächlich in der Rolle der Mutter.
Angetriebene Spindel – Aufbau und Mechanik
Die Konfiguration mit angetriebener Spindel, auch motorbetriebener Gewindetrieb, externer Linearantrieb, externe Mutter oder verfahrende Mutter genannt, bietet das höchste Maß an konstruktiver Flexibilität und Anpassbarkeit. Wie der Name schon sagt, erfolgt die Bewegung durch das Drehen der vom Motor angetriebenen Spindel. Wird die Mutter so geführt, dass sie sich nicht mit der Spindel mitdrehen kann, bewegt sie sich linear über die gesamte Gewindelänge der Spindel.
Abbildung 2 – Schnittzeichnung einer Konfiguration mit angetriebener Spindel.
Angetriebene Mutter – Aufbau und Mechanik
Die Baugruppe mit angetriebener Mutter ist die minimalistische und kompakteste Version der drei Konfigurationen. Diese Bauform bietet die kürzeste eingefahrene Länge und Einbaulänge, während die Rotation ihrer Komponenten praktisch unsichtbar ist. Andere Bezeichnungen für diesen Antriebstyp sind motorbetriebene Spindelmutter, Aktuator ohne Verdrehschutz, interne Mutter und verfahrende Spindel.
Die Mechanik eines SMLA mit angetriebener Mutter ist im Wesentlichen die Umkehrung der Konfiguration mit angetriebener Spindel. Bei laufendem Motor dreht sich die Mutter innerhalb der Motorwelle und sorgt dafür, dass sich die mit der Last verbundene Spindel durch den Motor bewegt.
Abbildung 3 – Schnittzeichnung einer Konfiguration mit angetriebener Mutter.
Teleskopierend – Aufbau und Mechanik
Die teleskopierende Ausführung arbeitet eher wie der klassische in den meisten Industrieanwendungen verwendete Kolbenstangen-Aktuator, bietet aber dennoch die Vorteile einer konfigurierbaren Basiseinheit aus Schrittmotor und Gewindespindel. Im Kern ist die teleskopierende Variante eine Konfiguration mit angetriebener Spindel plus zusätzlicher Gehäusebauteile, die die Gewindemutter gegen Mitdrehen sichern und sie mittels einer eingebauten Lagerbuchse gegenüber Seiten- und Momentlasten abstützen. Durch diese direkt eingebaute Führung und Abstützung kommen diese Ausführungen in vielen Fällen ohne externe Komponenten aus, die andernfalls notwendig wären. Andere Bezeichnungen für diesen Antriebstyp sind motorbetriebener Spindel-Aktuator, Aktuator mit Verdrehschutz, elektrische Kolbenstange und Elektrozylinder.
Die Mechanik eines telekopierenden SMLA ähnelt der Konfiguration mit angetriebener Spindel. Der Hauptunterschied ist die integrierte Führung und Abstützung in Form eines Schutzrohrs mit eingegossenen Kerben und einer Kolbenstange mit Stützlagerbuchse, sodass auf externe Komponenten verzichtet werden kann.
Abbildung 4 – Schnittzeichnung einer teleskopierenden Ausführung.
Montage
Für alle drei SMLA Konfigurationen gilt ein ähnlicher Montageprozess, der hauptsächlich darin besteht, den Motor zu montieren, die Spindel im Bedarfsfall abzustützen und die Last anzubauen. Die Unterschiede bestehen darin, wo die Last angebaut und wie sie abgestützt wird (Abbildung 5). Bei Konfigurationen mit angetriebener Spindel wird die Last an der Spindelmutter befestigt. Außerdem muss das Ende der Spindel bei größeren Längen mit einem Stehlager oder einer Buchse gestützt werden.
Bei der Konfiguration mit angetriebener Mutter wird die Last an der Spindel befestigt. Und bei der Teleskop-Konfiguration erfolgt der Anbau der Last an der Montageaufnahme an der Kolbenstange.
Die Konfigurationen mit angetriebener Spindel und Mutter können ausschließlich axiale Lasten aufnehmen. Daher ist für eine ordnungsgemäße Funktion eine Führung und Abstützung in Form von Linearlagern und Führungsschienen erforderlich. Da Teleskop-Aktuatoren bereits über eine eingebaute Führung und Abstützung verfügen, kann dort in vielen Fällen auf externe Linearlager und Führungsschienen verzichtet werden.
Abbildung 5 – Dieses Beispiel einer Fluidpumpe zeigt die typischen Anbaukonfigurationen für all drei SMLA-Typen (v.l.n.r.: angetriebene Spindel, angetriebene Mutter, Teleskop-Aktuator).
Anwendungstechnische Dimensionierung
Die flexible Konfigurierbarkeit der SMLAs eröffnet zahllose Anwendungsmöglichkeiten. Abbildung 6 zeigt einige gängige SMLA-Anwendungsbeispiele.
Abbildung 6 – Durch die Reduzierung der erforderlichen Komponenten sind SMLAs die ideale Lösung für eine Vielzahl von Anwendungen mit geringem Platzangebot zur Reduzieren, darunter (von links nach rechts): Kreuztische (rotierende Spindel), horizontale Positionierung (angetriebene Mutter) und Pipettierung (teleskopierende und angetriebene Spindel).
Bei der Dimensionierung eines SMLA für eine bestimmte Anwendung kommt es im Wesentlichen darauf an, die Limitierung von Motor, Spindel und Spindelmutter zu kennen. Für eine optimale Funktionsfähigkeit und lange Lebensdauer muss jede dieser Hauptkomponenten ausreichend dimensioniert sein. Glücklicherweise bieten die meisten Hersteller Diagramme zur theoretischen Leistung abhängig von diese Komponenten an, sodass die Dimensionierung eines Antriebs wenig Zeit beansprucht. In der Regel handelt es sich bei diesen Diagrammen um eine Geschwindigkeit/Last-Kurve, die den optimalen Leistungsbereich der Motor-, Spindel- und Mutter-Kombination hervorhebt.
SMLAs im Vergleich
SMLAs erlauben ein modulares Konstruktionskonzept für Linearantriebe, die den Entwicklern eine Lösung ermöglicht, die exakt auf die jeweiligen anwendungstechnischen Anforderungen zugeschnitten ist. Welcher der drei SMLA-Typen am besten geeignet ist, wird von vielen anwendungsspezifischen Faktoren bestimmt.
Wenn es darum geht, eine maximale Anpassbarkeit oder eine wirklich einzigartige Kombination der Komponenten zu finden, sind Antriebe mit angetriebener Spindel die erste Wahl. Varianten mit angetriebener Spindel sind der am häufigsten eingesetzte SMLA-Typ, sodass viele Konstrukteure damit bereits vertraut sein dürften.
Anwendungen, die von einem kompakteren, einfacheren Linearantrieb profitieren und keine spielfreie Mutter oder viele Encoder-Optionen benötigen, sind möglicherweise mit einer angetriebenen Mutter besser bedient. Wird eine eher klassische Konstruktion mit Kolbenstange bevorzugt oder wenn die Anwendung eine integrierte Führung und Abstützung mit eingebautem Verdrehschutz verlangt, kommt dagegen eher die teleskopierende Variante in Frage. Diese Konfiguration bietet sich zudem an, wenn es darauf ankommt, die Gesamtzahl der Komponenten zu reduzieren, denn dank der integrierten Führung/Abstützung können externe Vorrichtungen eingespart werden. Tabelle 1 fasst die allgemeinen Vor- und Nachteile jeder SMLA-Konfiguration zusammen und gibt einige gängige Anwendungsbeispiele.
Um Konstrukteure und Integratoren im Dschungel der vielen Optionen zu unterstützen, bieten immer mehr SMLA-Hersteller Online-Tools an, mit denen sie schnell und einfach optimale Lösungen für ihre Anwendungen konfigurieren können. Es gibt zum Beispiel Online-Auswahltools, mit denen die Nutzer in wenigen Minuten den passenden SMLA für ihre Anwendung finden, und die zugleich den Zugriff auf Leistungskennkurven, 3D-Modelle, Preise und Lieferzeiten bieten.
Die Nutzung von automatisierten Auswahltools im Kontext der Bauweise, Mechanik, Montage und Auslegung der drei wichtigsten SMLA-Typen führt Konstrukteure und Integratoren sicher zur optimalen Wahl für ihre Anwendungen.