

Gli attuatori lineari con motore passo-passo (SMLA) combinano un motore passo-passo, madreviti di precisione e una chiocciola in un unico involucro compatto, offrendo una soluzione altamente configurabile, personalizzabile e robusta per il movimento lineare. Con l'ausilio di un'unità di controllo del movimento e di un azionamento passo-passo, tutti gli SMLA possono essere programmati per posizionare il carico in una posizione precisa. Tuttavia, le configurazioni standard non forniscono un meccanismo di retroazione che comunichi all'operatore se lo spostamento è stato completato o meno.
Sebbene non sia essenziale per molte applicazioni, la retroazione può rivelarsi uno strumento potente da utilizzare nei sistemi di movimento lineare più sofisticati. Per questo motivo e per la crescente richiesta di informazioni precise sul posizionamento del carico, dotare un SMLA di un encoder può rappresentare una soluzione semplice ed efficace per ottenere la retroazione in tempo reale sul movimento della propria applicazione.
Configurazioni di base degli SMLA
La figura 1 mostra tre delle costruzioni di SMLA più comuni: madreviti motorizzate (MLS), una chiocciola di comando motorizzata (MLN) e un attuatore lineare motorizzato (MLA). Tutte queste costruzioni sono dotate all'interno di un motore passo-passo, madreviti e una chiocciola, ma differiscono nel modo in cui ottengono il movimento.
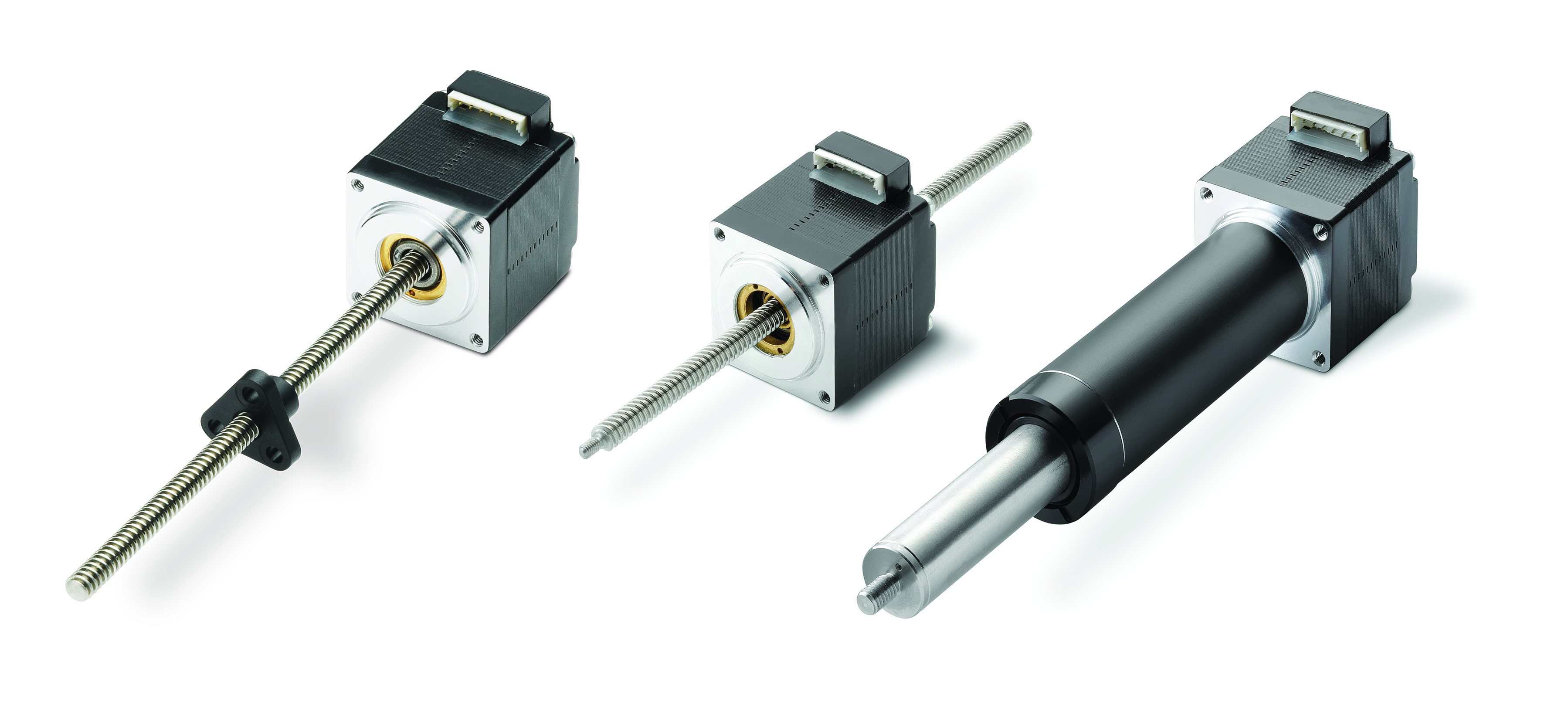
Figura 1. Tipi di SMLA (da sinistra a destra: MLS, MLN e MLA). Immagine per gentile concessione di Thomson Industries, Inc.
Nelle unità MLS, le madreviti sono fissate direttamente all'albero motore, che a sua volta trasla la chiocciola ruotando. Le unità MLN integrano la chiocciola all'interno dell'albero motore, che, quando ruotato, trasla le madreviti al posto della chiocciola. Le configurazioni MLA sono essenzialmente unità MLS con componenti aggiuntivi che ospitano le madreviti e la chiocciola, fornendo al contempo supporto e guida integrati.
Attuazione lineare a circuito aperto
La Figura 2 illustra l'architettura SMLA a circuito aperto che si applica a tutte le configurazioni. Gli utenti interagiscono con il sistema tramite un'interfaccia uomo-macchina (HMI). Programmano la sequenza di movimento desiderata nel controller di movimento, che la invia all'azionamento del motore passo-passo per la conversione e l'amplificazione prima di trasmetterla all'SMLA, che esegue i movimenti. Il percorso di comunicazione è unidirezionale: né il controller di movimento né l'HMI ricevono alcuna notifica del fatto che il movimento previsto sia stato completato con successo.
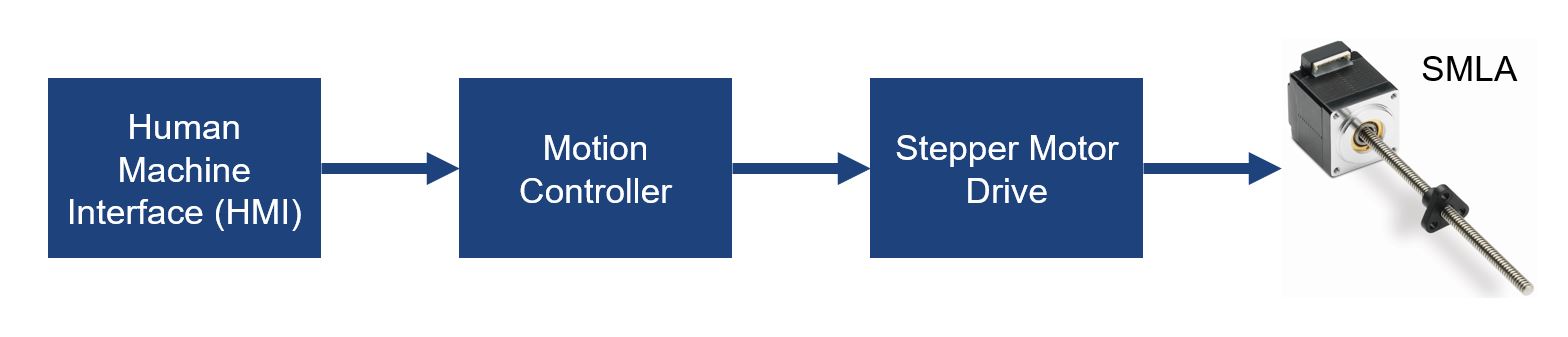
Figura 2: architettura per una configurazione di sistema a circuito aperto di base per azionare un SMLA. Immagine per gentile concessione di Thomson Industries, Inc.
Sapere esattamente dove si trova un carico è fondamentale per molte applicazioni ad alta precisione, come strumenti medici, dispositivi di misurazione e apparecchiature di laboratorio. Inoltre, alcune applicazioni possono spegnersi inaspettatamente o il relativo carico può spostarsi dalla posizione originaria. In tali scenari, sarebbe impossibile conoscere la posizione esatta del carico senza utilizzare un meccanismo di retroazione.
Un buon esempio di applicazione che trae vantaggio dalla funzionalità di un encoder è la macchina pipettatrice automatica. (Figura 3) Questi dispositivi utilizzano un encoder sull'asse orizzontale per tracciare con precisione la posizione della pipetta di erogazione e garantire che il fluido venga trasferito nella provetta corretta. Altri esempi includono pompe per fluidi, stampanti 3D e piastre XY.
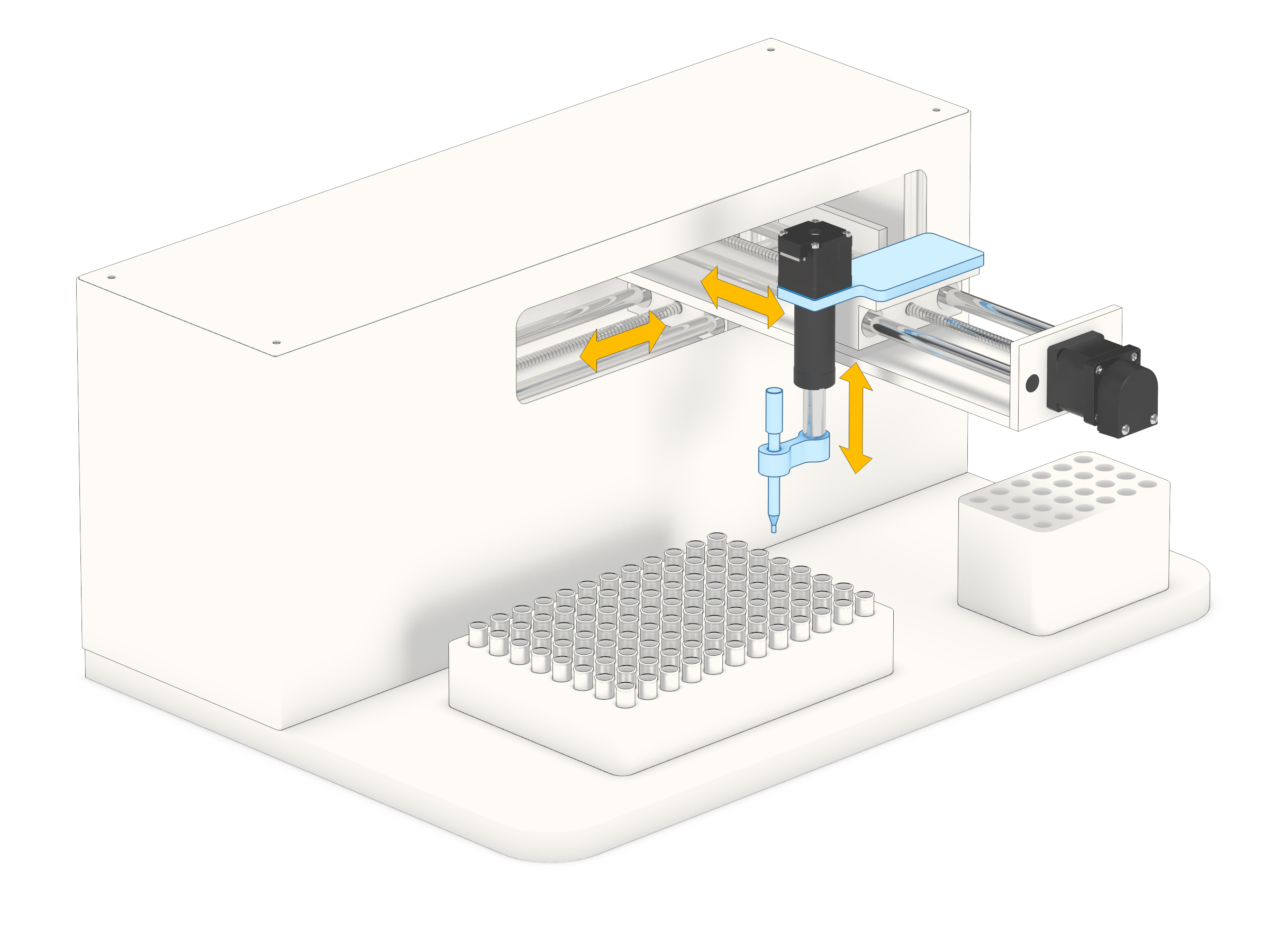
Figura 3: le macchine pipettatrici automatiche possono utilizzare un encoder sul loro asse orizzontale. Immagine per gentile concessione di Thomson Industries, Inc.
Chiusura del circuito con encoder rotativi ottici
Molti SMLA possono essere dotati di un encoder rotativo per fornire retroazione. Gli encoder rotativi, noti anche come encoder ad albero, convertono la posizione angolare di un albero in segnali di uscita analogici o digitali. Gli encoder rotativi ottici rappresentano la soluzione più comune per aggiungere funzionalità di retroazione agli assemblaggi SMLA. La Figura 4 illustra come l'aggiunta di un encoder a un SMLA possa fornire retroazione al controller e condividere dati di movimento importanti quali posizione, velocità o direzione.
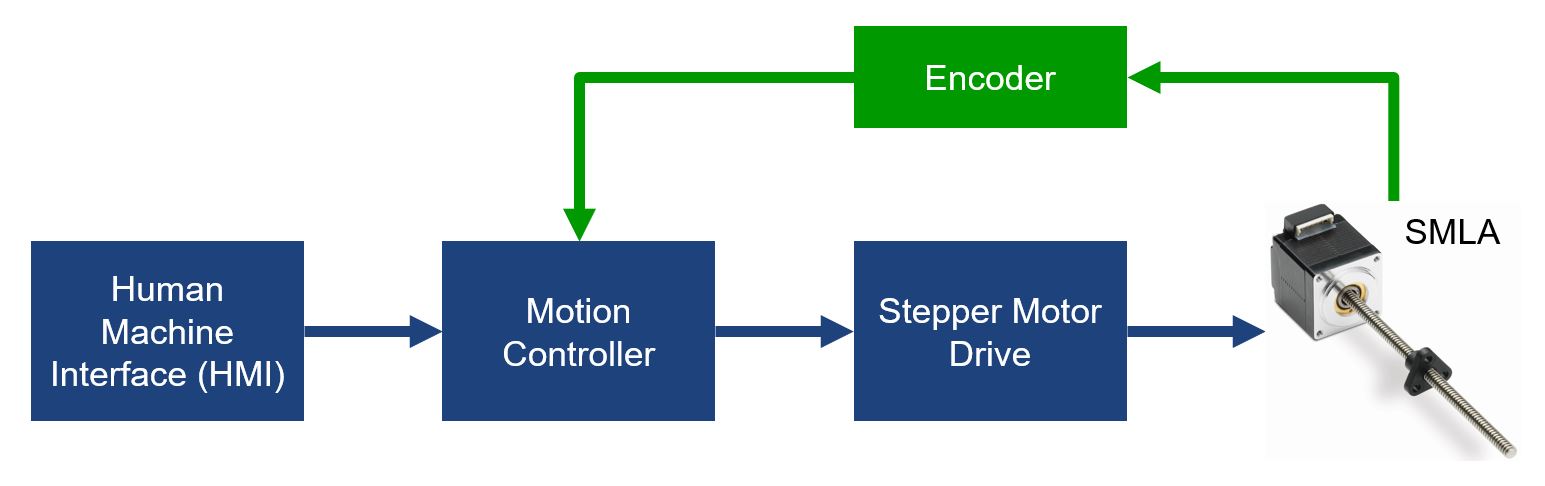
Figura 4: architettura per la configurazione di un sistema a circuito chiuso di base per azionare un SMLA. Immagine per gentile concessione di Thomson Industries, Inc.
Rilevamento della posizione con gli encoder
Esistono due tipi principali di encoder rotativi: incrementali o assoluti. (Figura 5)
Gli encoder rotativi incrementali utilizzano un disco rotante collegato a un albero e posizionato tra una sorgente luminosa e un fotosensore. Numerose fessure disposte uniformemente lungo il perimetro del disco consentono alla luce di passare al sensore secondo schemi di impulsi che rappresentano le caratteristiche del movimento.
Le applicazioni che richiedono dati di movimento ancora più dettagliati o un livello di protezione aggiuntivo in caso di interruzione di corrente trarrebbero vantaggio da un encoder assoluto. Come gli encoder incrementali, gli encoder assoluti sono montati centralmente e ruotano insieme all'albero motore tra una sorgente luminosa e un fotosensore. Invece di utilizzare fessure disposte uniformemente come un encoder incrementale, gli encoder assoluti utilizzano una disposizione intricata di aperture univoche su una superficie molto più ampia del disco. Interrompono i segnali luminosi in schemi che un chip rilevatore può leggere come rappresentazioni ad alta fedeltà di ogni posizione angolare della corsa, anche senza un dispositivo di ritorno.
Figura 5: sopra sono illustrati i processi per gli encoder incrementali (a sinistra) e assoluti (a destra). Immagine per gentile concessione di Thomson Industries, Inc.
Implementazione di encoder rotativi
In molti casi, gli encoder possono essere integrati in tutti e tre i tipi di configurazione di SMLA (MLS, MLN e MLA). Sono necessari solo una superficie piana su cui imbullonare il corpo dell'encoder e un albero su cui montare il disco ottico. L'albero deve essere un'estensione dell'albero motore originale in modo che il disco ottico possa ruotare con esso e catturare con precisione il movimento del motore, come mostrato nella Figura 6.
Figura 6: installazione di un encoder su un motore predisposto per encoder con l'albero sporgente e le superfici di montaggio richieste. Immagine per gentile concessione di Thomson Industries, Inc.
SMLA con encoder ottici aggiunti (da sinistra a destra: MLS, MLN e MLA). Immagine per gentile concessione di Thomson Industries, Inc.
Un passo avanti
Sebbene i sistemi SMLA a circuito aperto siano adatti a numerose applicazioni, gli utenti di motori passo-passo che desiderano una retroazione in tempo reale sulla posizione del carico dovrebbero prendere in considerazione l'aggiunta di encoder ai loro motori. Gli encoder possono fornire retroazione sulla posizione, dati in tempo reale su velocità, direzione e altre caratteristiche, migliorando al contempo il controllo e il monitoraggio del carico. Per la retroazione del posizionamento di base, gli utenti possono usare encoder incrementali ma, se è richiesta un'elevata precisione o la capacità di mantenere la posizione una volta accesa l'apparecchiatura, dovrebbero prendere in considerazione gli encoder assoluti.
La chiusura del ciclo di retroazione con encoder rotativi ottici non solo soddisfa le esigenze delle attuali applicazioni di precisione, ma posiziona anche gli SMLA come componenti preziosi nel panorama in evoluzione dell'Industria 4.0 e dell'innovazione della connettività digitale, garantendone la continua rilevanza ed efficacia nella prossima generazione di automazione industriale.