

Schrittmotor-Linearantriebe (SMLAs) kombinieren einen Schrittmotor mit Präzisionsspindel und -mutter zu einer kompakten Einheit – als flexibel konfigurierbare und robuste Lösung für Linearsysteme. Mittels Motion-Controller und Schrittmotortreiber lassen sich alle SMLA-Varianten darauf programmieren, eine Last präzise zu positionieren. Allerdings verfügen die Standardkonfigurationen über keine mechanische Positionsrückführung, die dem Bediener mitteilt, wann und ob eine Bewegung abgeschlossen ist.
Wenngleich für viele Anwendungsfälle nicht unbedingt erforderlich, stellt eine solche Rückführung bei komplexeren Linearsystemen eine wertvolle, zuweilen sogar unverzichtbare, Zusatzfunktion dar. Angesichts dessen und aufgrund der zunehmenden Nachfrage nach präzisen Positionsangaben der bewegten Last bietet die Ausrüstung eines SMLA mit einem Drehgeber eine ebenso effektive wie einfache Lösung, um eine Verfahrbewegung in Echtzeit sichtbar zu machen.
SMLA-Basiskonfigurationen
Abbildung 1 zeigt die drei gängigsten SMLA-Varianten: angetriebene Spindel (MLS), angetriebene Mutter (MLN) und geschlossene Aktuatorausführung (MLA). Alle Konfigurationen bestehen im Kern aus einem Schrittmotor, einer Spindel und einer Mutter, unterscheiden sich aber in der Art der Bewegungserzeugung.
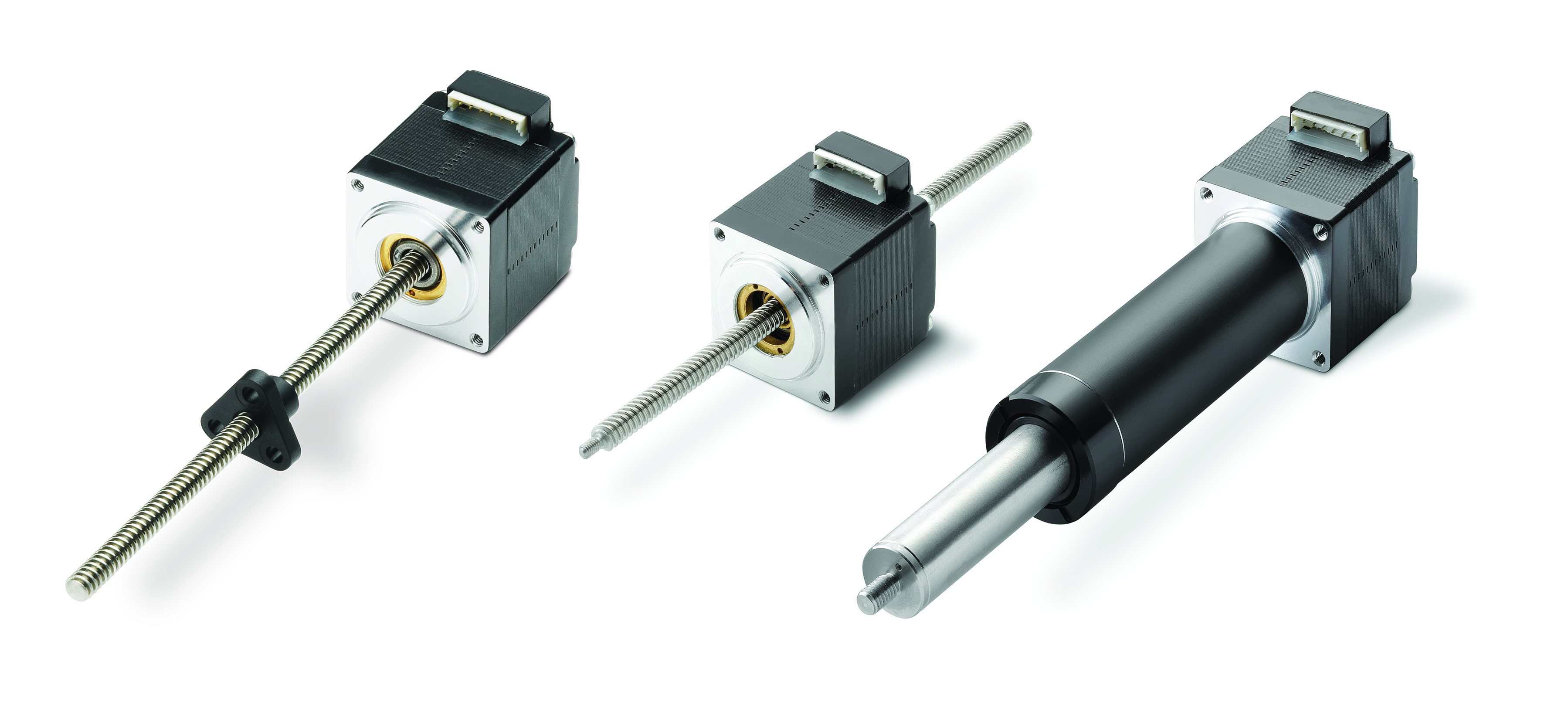
Abbildung 1: SMLA-Varianten (v.l.n.r.: MLS, MLN und MLA). Abbildung mit freundlicher Genehmigung von Thomson Industries, Inc.
Bei den MLS-Einheiten ist die Spindel direkt mit der Motorwelle verbunden, deren Drehung über die Mutter in eine Linearbewegung übersetzt wird. Bei den MLN-Einheiten ist die Mutter im Motorläufer integriert, sodass anstelle der Mutter die Spindel linear bewegt wird. Bei den MLA-Konfigurationen handelt es sich im Wesentlichen um MLS-Einheiten mit zusätzlichen Komponenten, welche die Spindel und Mutter aufnehmen, während sie zugleich eine integrierte Abstützung und Führung bieten.
Lineare Betätigung in offener Regelstrecke
Abbildung 2 illustriert die für alle Konfigurationen geltende SMLA-Architektur in offener Regelstrecke (ohne Rückführung). Die Benutzer interagieren mit dem System über eine Bedienschnittstelle (HMI). Dort programmieren sie die gewünschte Bewegungsabfolge zum Motion-Controller, der sie zur Umwandlung und Verstärkung an den Schrittmotortreiber sendet, bevor sie zum SMLA gelangt, der die gewünschte Bewegungen ausführt. Der Kommunikationsweg ist wie abgebildet unidirektional. Das heißt, weder der Motion-Controller noch die Bedienschnittstelle werden benachrichtigt, ob die programmierte Bewegung erfolgreich ausgeführt wurde.
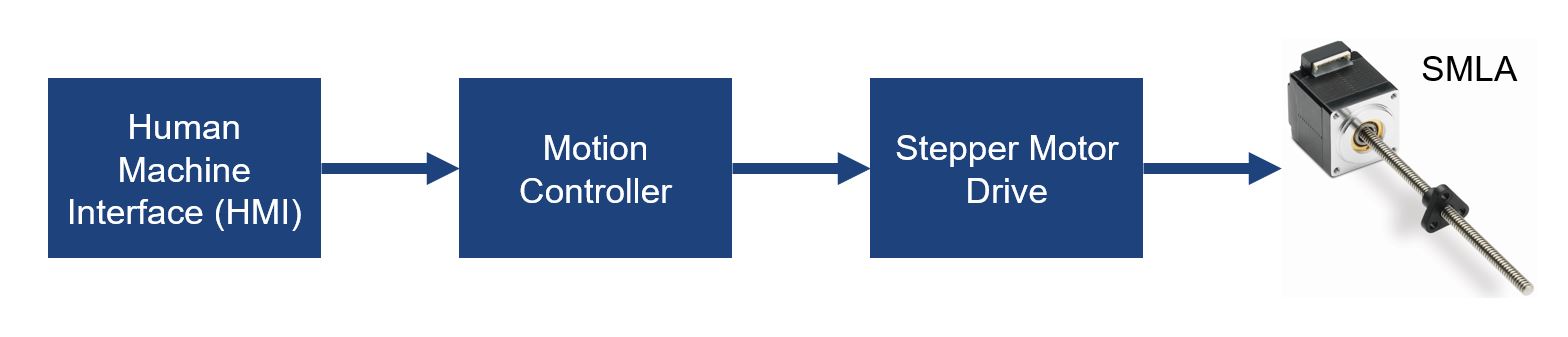
Abbildung 2: Architektur für ein Basissystem mit offener Regelstrecke zur Ansteuerung eines SMLA. Abbildung mit freundlicher Genehmigung von Thomson Industries, Inc.
Für viele Präzisionsanwendungen, wie zum Beispiel medizinische Instrumente, Messgeräte und Laborausrüstung, ist es jedoch unverzichtbar, die exakte Position der Last zu kennen. Ebenso können in bestimmten Anwendungen unerwartete Abschaltungen auftreten oder die Last wandert aus ihrer angefahrenen Position. In solchen Fällen wäre es ohne eine spezielle Rückführungsvorrichtung unmöglich, die genaue Position der Last zu kennen.
Ein typisches Beispiel für eine Anwendung, die von einem Drehgeber profitiert, ist automatische Pipettiermaschine (Abbildung 3). Diese Geräte verwenden einen Drehgeber auf der horizontalen Achse (im Bild rechts), um die Position der Dosierpipette genau zu verfolgen und somit sicherzustellen, dass die Flüssigkeit ins korrekte Reagenzglas gefüllt wird. Weitere Beispiele sind Fluidpumpen, 3D-Drucker und Kreuztische.
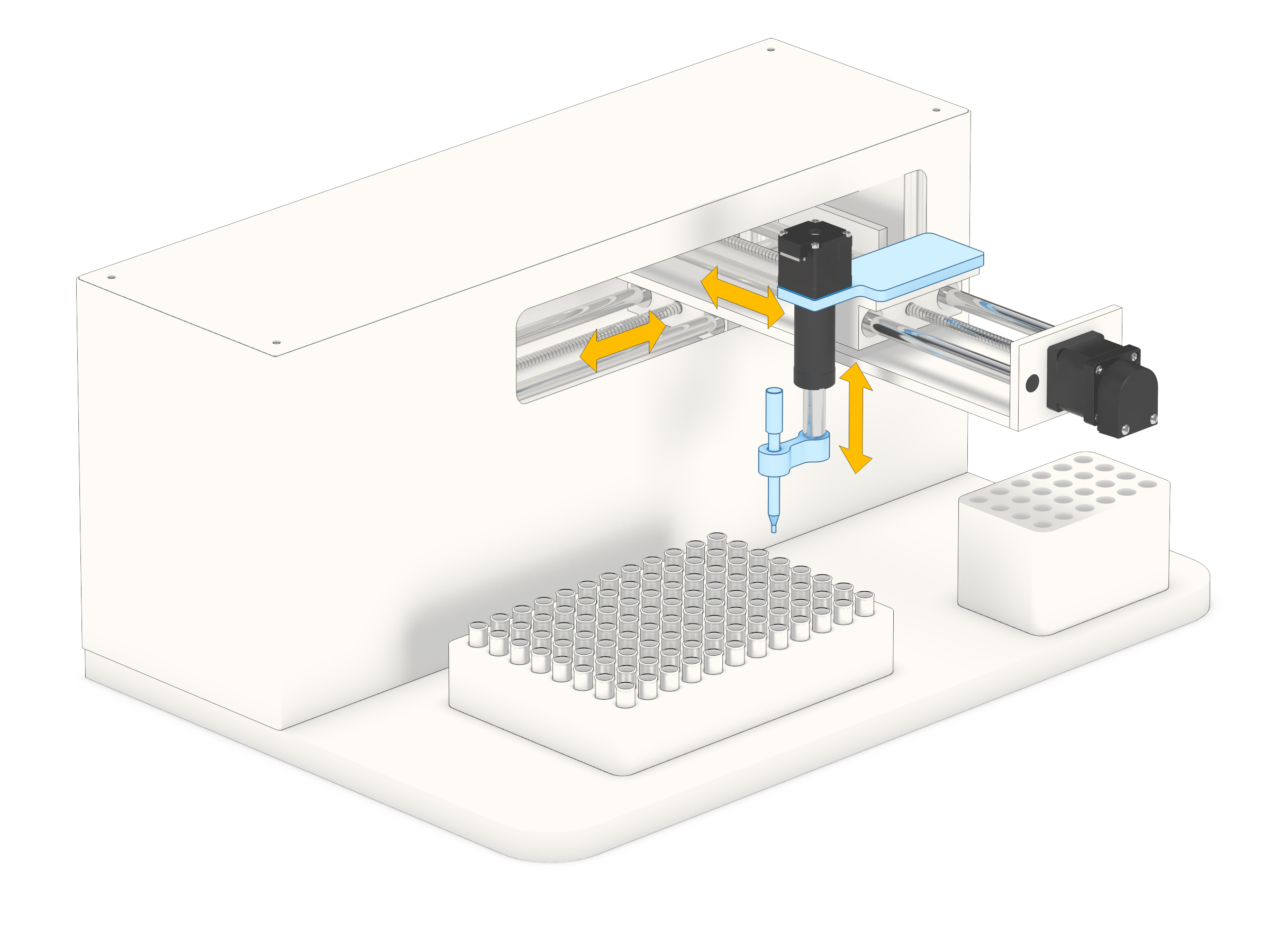
Abbildung 3: Automatisierte Pipettiermaschine mit einen Drehgeber (rechts) auf ihrer horizontalen Achse. Abbildung mit freundlicher Genehmigung von Thomson Industries, Inc.
Optische Drehgeber schließen den Regelkreis
Viele SMLAs können durch Anbau eines Drehgebers mit einer Rückführungsfunktion aufgerüstet werden. Drehgeber, auch als Wellengeber bekannt, wandeln die Winkelposition einer Welle in Gegenstück oder digitale Ausgangssignale um. Hierbei sind optische Drehgeber die meist genutzte Möglichkeit, um SMLA-Einheiten mit einer Positionsrückführung auszustatten. Abbildung 4 zeigt, wie der Drehgeber eines SMLA ein Rückführsignal an die Steuerung liefert und dabei wichtige Bewegungsdaten wie Position, Geschwindigkeit oder Richtung bereitstellt.
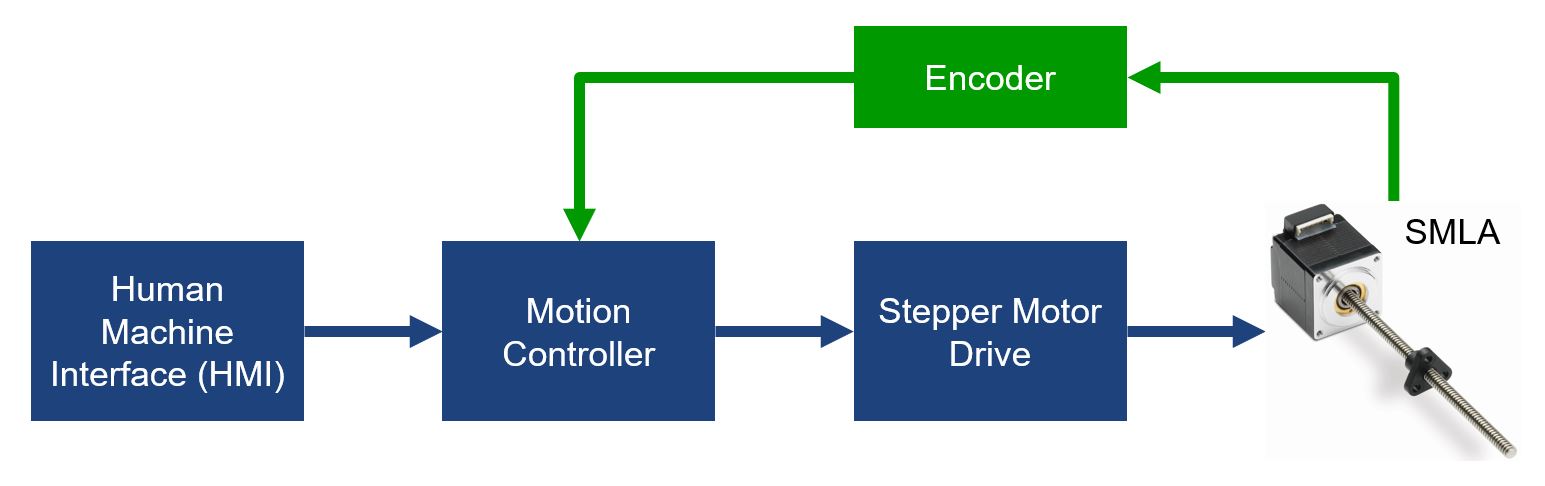
Abbildung 4: Architektur für ein Basissystem mit geschlossenem Regelkreis zur Ansteuerung eines SMLA. Abbildung mit freundlicher Genehmigung von Thomson Industries, Inc.
Positionsbestimmung mit Drehgebern
Es wird zwischen zwei Hauptvarianten von Drehgebern unterschieden: inkremental und absolut (Abbildung 5).
Bei inkrementalen Drehgebern sitzt eine rotierende Schlitzscheibe auf einer angetriebenen Welle und dreht sich zwischen einer Lichtquelle und einem Fotosensor. Die gleichmäßig rund um die Scheibe angeordneten Schlitze lassen das Licht in Impulsmustern zum Sensor durch, wodurch die Bewegung charakterisiert wird.
Für Anwendungen, die erweiterte Bewegungsdaten benötigen oder zusätzlich gegen Stromausfall abgesichert sein müssen, bietet sich ein Absolutwertgeber an. Wie beim inkrementalen Drehgeber dreht sich auch hier eine Scheibe parallel zur Motorwelle zwischen einer Lichtquelle und einem Fotosensor. Anstelle der gleichmäßig angeordneten Schlitze eines Inkrementalgebers verwenden Absolutwertgeber jedoch eine komplizierte Anordnung unterschiedlich geformter Öffnungen über eine erheblich größere Fläche der Scheibe. Diese lassen die Lichtsignale in bestimmten Mustern durch, die ein Detektorchip als detailgetreue Abbildung jeder Winkelposition des Hubs auslesen kann – auch ohne Nullstellung.
Abbildung 5: Aufbau und Funktionsweise inkrementaler (links) und absoluter Drehgeber (rechts). Abbildung mit freundlicher Genehmigung von Thomson Industries, Inc.
Implementierung von Drehgebern
In vielen Fällen lassen sich Drehgeber in alle drei SMLA-Konfigurationen (MLS, MLN und MLA) integrieren. Benötigt wird lediglich eine ebene Fläche, auf die das Drehgebergehäuse geschraubt wird, sowie eine Welle zur Montage der optischen Scheibe. Die Welle muss eine Verlängerung der eigentlichen Motorwelle sein, damit sich die Scheibe parallel zu ihr dreht, um die Motordrehung exakt zu erfassen (siehe Abbildung 6).
Abbildung 6: Montage eines Drehgebers an einen dafür vorbereiteten Motor mit herausstehender Welle und Anbaufläche. Abbildung mit freundlicher Genehmigung von Thomson Industries, Inc.
SMLAs mit angebauten optischen Drehgebern (v.l.n.r.: MLS, MLN und MLA). Abbildung mit freundlicher Genehmigung von Thomson Industries, Inc.
Ein Schritt nach vorne
Während SMLA-Systeme mit offener Regelstrecke für viele Anwendungen ausreichend sind, empfiehlt sich für Schrittmotor-Anwendungen, die eine Echtzeit-Positionsrückführung der Last erfordern, der Anbau von Drehgebern an die Motoren. Drehgeber liefern in Echtzeit die aktuelle Position sowie Daten zur Geschwindigkeit, Bewegungsrichtung usw., um eine optimierte Steuerung und Überwachung der Last zu erreichen. Für eine einfache Positionsrückführung sollten Anwender Inkrementalgeber spezifizieren. Ist jedoch eine höhere Präzision gefordert oder muss die Position der Last nach dem Wiedereinschalten des Systems bekannt sein, empfehlen sich Absolutwertgeber.
Der geschlossene Regelkreis dank Rückführungssignal mit optischen Drehgebern erfüllt nicht nur die hohen Anforderungen moderner Präzisionsanwendungen. Er positioniert SMLAs darüber hinaus als wertvolle Komponenten im dynamischen Umfeld von Industrie 4.0 und der digitalen Konnektivität. Somit ist ihre Relevanz und Effektivität auch für die nächste Generation der industriellen Automatisierung nachhaltig sichergestellt.