Technology Behind Electrak HD
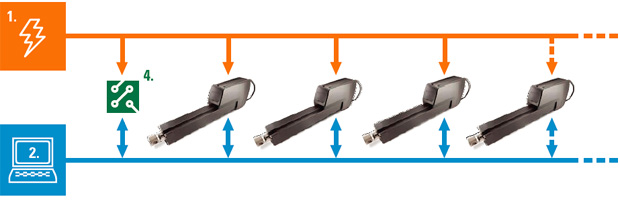
Smart Onboard Electronics for Easier Control

Thomson’s Electrak Modular Control System (EMCS) is built into every HD actuator and serves as the foundation for the best onboard controls currently available on the market including, optional CANopen or SAE J1939 CAN bus control options.
Industry-leading Onboard Electronics
The Electrak Modular Control System is the culmination of decades of global design and application engineering in some of the toughest environments.
Electronic Monitoring Package – Standard on all Electrak HD Actuators
Safety comes first. Each HD electric linear actuator is equipped with the Electrak Monitoring Package which will constantly monitor critical parameters and take appropriate action as needed. Each unit will reset automatically when conditions return to normal allowing for operation to continue.
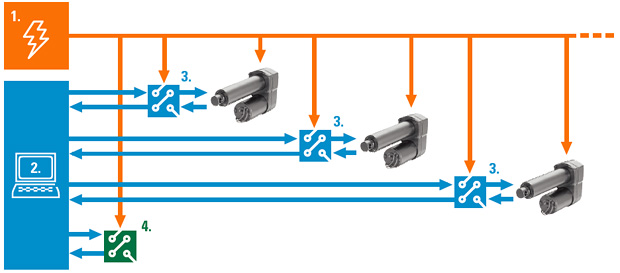
A Wide Range of Optional Control Features Within the Same Compact Envelope
Optional control functions can eliminate the need for external controls, saving design and installation time, as well as space and installed cost. A generous selection of control configurations can tailor HD to fit a great breadth of heavy-duty applications. The available control configurations are described on the next page and more details, including wiring diagrams for each option, begin on page 22 of the Electrak HD Brochure.